- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Практическая работа №. Изучение электрического исполнительного механизма. Теоретическая часть
Практическая работа №
Изучение электрического исполнительного механизма
| Цель работы: | изучить устройство и работу электрического исполнительного механизма. |
| Порядок выполнения работы: | 1. Повторите теоретические положения по теме и выпишите определение, формулы расчета и т.п. 2. Раскажите по схеме управлениеэлектрическим исполнительным механизмом. 3. Ответьте на вопросы. |
Теоретическая часть
Блок-схема электродвигательного исполнительного механизма (ИМ), работающего в системе автоматического управления (САУ), представлена на рис.2. Она работает следующим образом. Управляющий сигнал с выхода регулятора (контроллера), поступает на двигатель Д, который через редуктор Р перемещает рабочий орган РО. Концевые выключатели KB служат для выключения двигателя в крайних положениях. При отключении САУ имеется возможность вручную перемещать рабочий орган с помощью ручного привода РП. Датчик обратной связи по положению ДОСП формирует сигнал, пропорциональный положению рабочего органа Р. Если управляющий сигнал регулятора представляет собой замыкающийся/размыкающийся контакт (релейный выход), рабочий орган перемещается с постоянной скоростью. Сигнал обратной связи подается в регулятор и суммируется в нем с сигналом задания, тем самым формируя сигнал рассогласования. Наличие сигнала обратной связи по положению у ИМ постоянной скорости перемещения дает возможность осуществлять непрерывные законы регулирования (П, ПИ, ПИД), имея регулятор с релейным выходом.
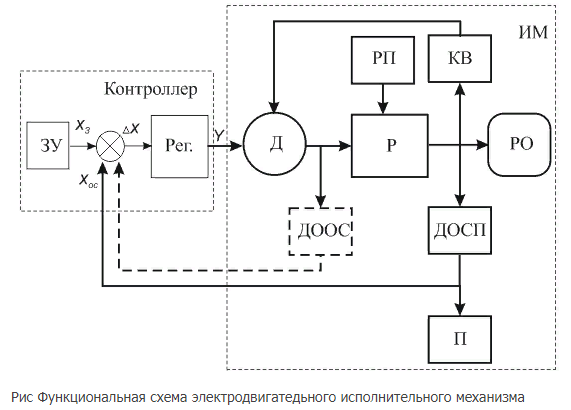
Сигнал обратной связи можно визуально наблюдать на приборе П, если ИМ укомплектован этим прибором. Датчик обратной связи ДОСП может быть выполнен в виде потенциометра, индуктивного трансформаторного датчика с выходом по напряжению или по току.
Датчики обратной связи по положению ОСП, выполняемые в виде потенциометров, индуктивных датчиков или линейных индукционных потенциометров, и датчики обратной связи по скорости ОСС, выполняемые в виде тахогенераторов постоянного или переменного тока, служат для ввода дополнительных сигналов, необходимых для получения требуемых характеристик от электрического исполнительного механизма.
Для получения средней переменной скорости перемещения рабочего органа исполнительного механизма при релейном управлении широко используется импульсный режим работы его электродвигателя. При этом сигнал с регулятора представляет собой периодическое замыкание/размыкание контактов, а средняя скорость перемещения формируется за счет длительности замкнутого состояния (импульса), либо за счет длительности разомкнутого состояния (паузы).
Если в регуляторе, который управляет ИМ, имеется возможность управлять скоростью двигателя (фазовое управление, либо аналоговый выход и двигатель постоянного тока в ИМ), ИМ может иметь датчик обратной связи по скорости ДООС (на рисунке хх показан пунктиром).
На рисунке хх показана типовая схема включения ИМ с трехфазным двигателем без датчика обратной связи по положению.
Рисунок 2 - Типовая схема включения ИМ типа МЭО в ручном режиме управления.
КМ1, КМ2 – магнитные пускатели; HL1…HL3 –сигнальные лампы; RU1…RU3 – варисторы;
SB1…SB3 – кнопки управления; QF1 – выключатель автоматический; SQFC1– микровыключатель ограничителя момента открытия; SQFТ1– выключатель ограничителя момента закрытия; SQC1, SQC2– концевые выключатели открытия; SQТ1, SQТ2– концевые выключатели закрытия;
Магнитный пускатель КМ2.1 срабатывает при нажатии кнопки SB1 и включает ИМ на открывание. В цепь магнитного пускателя КМ1 включен контакт КМ1.2, который служит для электрической блокировки одновременного включения КМ1.1 и КМ2.1, и последовательно включен концевой выключатель ограничения момента открытия SQFC1 и конечный выключатель открытого положения SQC1. При повороте вала ИМ в крайнее положение концевой выключатель SQC1 размыкается, пускатель КМ1 обесточивается, ИМ останавливается, при этом нормально замкнутый контакт КМ1.2 разрешает включение ИМ на закрытие.
Цепь закрытия ИМ состоит из кнопки управления SB2, последовательно включенных блок-контакта КМ1.2 и выключатель ограничения момента открытия SQFТ1, конечного выключателя открытого положения SQТ1 и работает аналогично цепи открывания. Кнопка SB3 служит для останова ИМ в любом положении.
Кроме описанных цепей схема содержит цепи сигнализации открытого и закрытого положений ИМ.
Цепь открытия ИМ
Цепь закрытия ИМ
Цепь срабатывания моментного выключателя
Цепь сигнализации полного открытия
Цепь сигнализации полного закрытия
Контрольные вопросы
1. Назначение электрического исполнительного механизма?
2. Для чего нужны концевые выключатели?
3. Из чего состоит электрический исполнительный механизм?
4. Как осуществляется управление электрическим исполнительным механизмом?
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|