- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
ОП.07 Технологическое оборудование
ОП.07 Технологическое оборудование
Тема 2.5. (22.04) – 80 мин
Коробки скоростей
Лекция 11
Цели занятия:
1. Изучить основные понятия темы лекции, методы выполнения кинематических расчетов коробок скоростей, назначение структурной сетки и графика частот вращения валов коробки скоростей, используя материал лекции №11
2. Составить краткий опорный конспект в срок до 24.04.2020 г.
План
1 Структурная сетка
2.График частот вращения шпинделей
3. Кинематический расчет коробок скоростей
Краткий опорный конспект лекционного материала оформить в конспекте, сфотографировать на телефон и выслать на электронную почту: dyachencko@ mail.ru или сообщением на личную страницу ВКонтакте https://vk.com/id121881712 до 24.04.2020
ФОТО ОБЯЗАТЕЛЬНО ДОЛЖНЫ ВЫСЛАТЬ СЛЕДУЮЩИЕ ОБУЧАЮЩИЕСЯ:
1. Бондарчук Д.А.
2. Замковой А.В.
3. Мошненко Д.В.
4. Мольчук А.Г.
5. Шкондина А.Е.
ОСТАЛЬНЫЕ – ПО ЖЕЛАНИЮ
Рекомендуемая литература:
А.Г. Схиртладзе, В.Ю. Новиков. Технологическое оборудование машиностроительных производств, с. 22-30
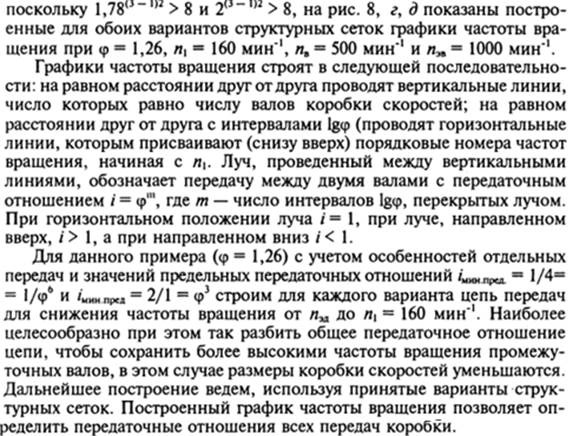
ЛЕКЦИЯ 11
Для кинематических расчетов коробок скоростей и подач в металлорежущих станках применяют два метода: аналитический и графоаналитический. Оба метода позволяют находить величины передаточных отношений. Однако, как правило, используют только графоаналитический метод. Достоинством его является то, что он позволяет быстро находить возможные варианты решения, что дает большую наглядность и облегчает сравнение вариантов. При графоаналитическом методе последовательно строят структурную сетку и график частоты вращения.
Структурная сетка дает ясное представление о структуре привода станка. По структурной сетке легко проследить связи между передаточными отношениями групповых передач (групповой передачей называют совокупность передач между двумя последовательными валами коробки скоростей или подач). Однако сетка не дает конкретных значений этих величин. Она наглядно характеризует ряд структур в общей форме. Структурная сетка содержит следующие данные о приводе: число групп передач, число передач в каждой группе, относительный порядок конструктивного расположения групп вдоль цепи передач, порядок кинематического включения групп, диапазон регулирования групповых передач, число частот вращения ведущего и ведомого валов групповой передачи.
График частоты вращения позволяет определить конкретные величины передаточных отношений всех передач привода и частоты вращения всех его валов. Его строят в соответствии с кинематической схемой привода. При разработке кинематической схемы коробки скоростей или подач с вращательным главным движением должны быть известны: число ступеней частоты вращения Z шпинделя, знаменатель геометрического ряда φ частоты вращения шпинделя от n1 до nz и частота вращения электродвигателя nэл.
Число ступеней частоты вращения шпинделя Z при наладке последовательно включенными групповыми передачами (в многоваловых коробках) равно произведению числа передач в каждой группе, т. е. Z= РаРьРс...Рк.
Например, для привода, показанного на рис. 1:
Z= Ра РьРс =3x2x2 =12.
При заданном или выбранном числе ступеней ряда частоты вращения шпинделя число групп передач в каждой группе и порядок расположения групп можно выбирать различными. Этот выбор в основном и определяет конструкцию коробки скоростей и подач.
Для наиболее часто применяемых значений могут быть использованы следующие конструктивные варианты:
В станках с изменением вращения шпинделя по геометрическому ряду передаточное отношение передач в группах образуют геометрический ряд со знаменателем φх, где х — целое число, которое называютхарактеристикой группы. Характеристика группы равна числу ступеней скорости, кинематически предшествующих данной группе. Общее уравнение наладки групповых передач имеет следующий вид:
ix: і2:і3… iр= 
Для последовательного получения всех частот вращения шпинделя сначала переключают передачи одной группы, затем другой и т. д. Если в коробке скоростей, показанной на рис. 1, использовать с этой целью, прежде всего, передачи группы (А), затем группы (С) и в последнюю очередь группы (В), то соответственно этому порядку переключения группа (А) будет основной, группа (С) — первой переборной, группа (В) — второй переборной.
Для основной группы передач характеристика Х0= 1; для первой переборной группы Х1= Р1, для второй переборной группы Х2 = Р1Р2 и т. д., где Р1 и Р2 — соответственно числа передач основной и первой переборной группы.
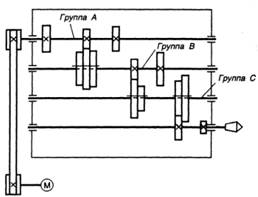
Рисунок 1- Кинематическая схема коробки скоростей на 12 ступеней с последовательным включением групп передач
Для конструктивного варианта привода, показанного на рис. 1 и принятого порядка переключения скоростей, можно записать структурную формулу Z=3(l)x2(6)x2(3). В формуле цифрами в скобках обозначены характеристики групп. Основной и различными по номеру переборными группами может быть любая группа передач в приводе. Поэтому наряду с конструктивными вариантами привода возможны также различные его кинематические варианты.
Во избежание чрезвычайно больших диаметров зубчатых колес в коробках скоростей, а также для нормальной их работы установлены следующие предельные передаточные отношения между валами при прямозубом зацеплении:
2>φ >(1/4); отсюда наибольший диапазон регулирования групповой передачи будет (imax/imin )пред= 2/1(1/4) = 8.
Отношение (imax/imin )пред имеет наибольшую величину для последней переборной группы привода, следовательно, для коробок скоростей, где Хmax — наибольший показатель для последней переборной группы, Р— число передач в этой группе.
Таким образом, если откладывать на первой линии последовательные значения логарифмов частот вращения 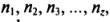 то интервалы между ними будут постоянными и равными lgφ.
то интервалы между ними будут постоянными и равными lgφ.
Рассмотрим построение структурной сетки и графика частот вращения для коробки скоростей, кинематическая схема которой показана на рис.2, а. Для принятого конструктивного варианта привода возможны два варианта структурной формулы: Z= 6 = 3(1)2(3) и Z= 6 =3(2)2(1). В первом случае основой группы будет первая в конструктивном отношении группа передач, а первой переборной — вторая группа передач; для второго случая наоборот.
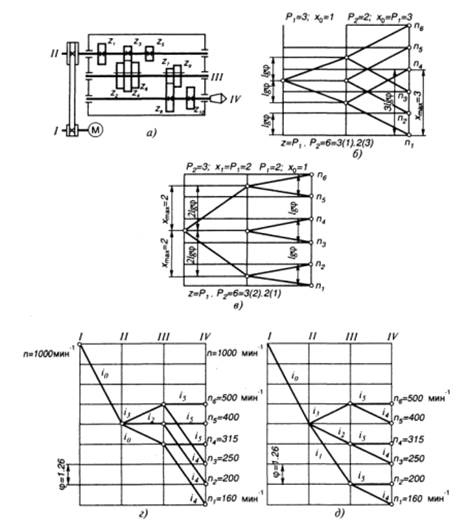
Рисунок 2- Кинематическая схема, структурные сетки и графики частот вращения коробки скоростей на шесть ступеней
На рис. 2, б, в показаны структурные сетки приведенных структурных формул привода. Они построены следующим образом. На равном расстоянии друг от друга проводят вертикальные линии, число которых должно быть на единицу больше, чем число групповых передач. Также проводят ряд горизонтальных параллельных прямых с интервалом, равным логарифму lgφ (число горизонтальных прямых равно числу Z ступеней частоты вращения шпинделя). На середине первой слева вертикальной линии наносят точку О, из которой симметрично, в соответствии с числом передач в группах, по заданной структурной формуле проводят лучи, соединяющие точки на вертикальных линиях. Расстояние между соседними лучами должны быть равными Хі lgφ, где Xi— характеристика соответствующей группы.
Оптимальный вариант структурной сетки выбирают из следующих соображений. Выше отмечалось, что независимо от порядка переключений групповых передач диапазон регулирования последней переборной группы является наибольшим. Поэтому следует определить регулирования последовательных переборных групп для всех вариантов структурных сеток (при выбранном значении φ) и исключить из дальнейшего рассмотрения варианты, не удовлетворяющие условию

Для варианта, показанного на рис. 2, б, Хmax= 3, а для варианта, показанного на рис. 2, в, Хmax = 2. Вариант, приведенный на рис. 2, б подходит для всех значений  , за исключением
, за исключением 
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|