- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Занятие «Гоночный автомобиль»
Занятие «Гоночный автомобиль»
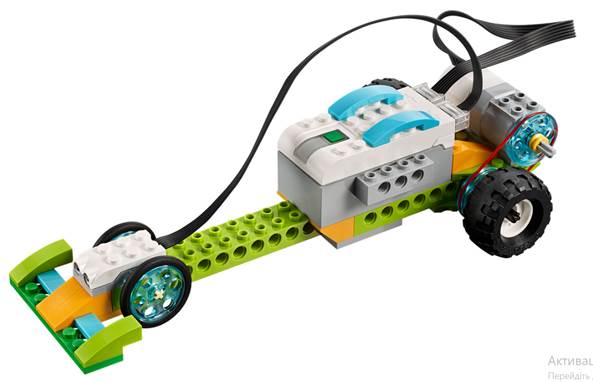
Тебе наверняка уже знаком робот «гоночный автомобиль», который выглядит, словно создан для участия в «Формуле1»:
Что же она обычно делает? Когда датчик расстояния срабатывает, она запускается и едет вперёд, параллельно считая промежутки времени, приблизительно равные половине секунды, пока приближается к препятствию, после чего останавливается. Вот как выглядит стандартная программа:

Пример 1
Давай немного изменим принцип работы, пусть «автомобиль» едет вперёд на максимальной мощности, считая секунды (приблизительно) такой езды, но после того как активируется датчик движения, то робот покажет предупреждение (слово «препятствие» на фоне знака стоп) и продолжит движение, но на половине мощности на протяжении трёх секунд, после чего остановится.

Пример 2
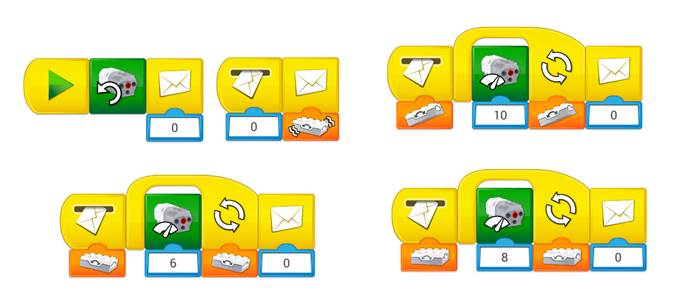
А теперь давай мысленно подключим к роботу ещё и датчик наклона, пусть в обычных условиях (на ровной поверхности) он едет с мощностью 8, при подъёме куда-то – с мощностью 10, при спуске – 6.
Программа выглядит так:
Задача 1
Дорогие спорт кары не приспособлены ездить по ухабистым дорогам, а также машины уже несколько лет могут определять расстояние до предполагаемого препятствия, поэтому предлагаю тебе написать программу, которая будет обеспечивать остановку робота при начале тряски или в условиях приближения препятствия. При этом в первом и во втором случае будут подаваться разные звуковые сигналы.
Задача 2
Вспомни первый пример, но его ведь можно улучшить, пусть автомобиль едет с произвольной мощностью вперёд, пока не засечёт препятствие (не среагирует датчик расстояния), после чего подаёт сигнал в виде картинки №27 и едет назад с мощностью больше на 1 чем предыдущая, издавая звук №5, пока не накренится в любую сторону, после чего остановится.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|