- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Применение электродвигателей постоянного тока в промышленности
1.1 Применение электродвигателей постоянного тока в промышленности
| Изм. |
| Лист |
| № докум. |
| Подп. |
| Дата |
| Лист |
| 5 |
| ДП.13.02.10.19ПЗ |
ности, что обусловлено следующими причинами:
- возможность плавного регулирования частоты вращения вала,
- хорошие пусковые свойства.
( 1 интервал)
1.2 Конструкция двигателя постоянного тока
( 1 интервал)
Конструкция двигателя постоянного тока изображена на рисунке 1.
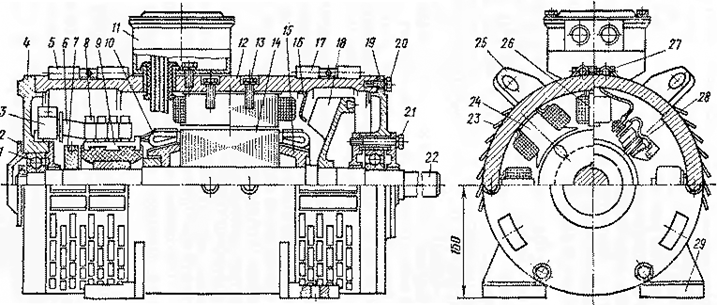
1- подшипник шариковый; 2- крышка подшипника; 3- траверса щеточная; 4- щит подшипниковый; ….29- лапы.
Рисунок 1 - Двигатель постоянного тока серии 2П
(Если наименование рисунка состоит из нескольких строк, то его следует записывать через один межстрочный интервал).
1.4.2 Расчёт обмотки якоря
Варианты простой волновой обмотки приведены в таблице 1 и выбираются в соответствии с рекомендациями таблицы 10.7 [1, с.31].
| Изм. |
| Лист |
| № докум. |
| Подп. |
| Дата |
| Лист |
| 6 |
| ДП.13.02.10.19ПЗ |
Таблица 1 – Варианты простой волновой обмотки
(Если наименование таблицы занимает две строки и более, то его следует записывать через один межстрочный интервал).
| № варианта | Uп | K | Wкс | Uк, B |
| 35,2 | ||||
| 17,6 | ||||
| 11,7 | ||||
| 1,5 | 8,8 |
( 1 интервал)
Следует выбрать вариант № 3, обеспечивающий обмотку с целым числом витков в катушечной секции Wкс = 2 и с напряжением Uк = 11,7 В < 16 В.
Число зубцов Z2 определяют по формуле (1.12)
(1 интервал)
Z2 = πD2 / t2 , (1.12)
(1 интервал)
где π = 3,14;
D2 = 130 мм, диаметр якоря, выбирают по таблице 10.2 [1, с. 33]; t2 – зубцовый шаг, мм.
По рекомендациям [1] в зависимости от высоты оси вращения зубцовый шаг может находиться в пределах от 10 мм до 20 мм.
Следует выбирать t2min = 14 мм, t2max = 17 мм.
Z2 max = 3,14  130 / 14 = 24
130 / 14 = 24
Z2 min = 3,14 130 / 17 ≈ 29
Окончательное число пазов для рассматриваемой машины Z2 = 25.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|