- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Классификация кинематических, динамических и энергетических характеристики их единицы измерения
Контрольная 3 вариант 12
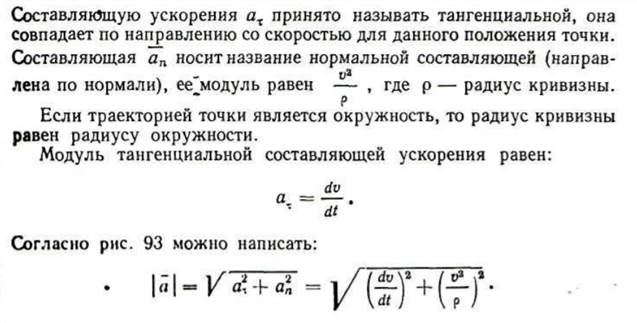
1. Ускорение точки: среднее и мгновенное Ускорение как векторная величина Разложение вектора линейного ускорения на составляющие: как вычисляется каждая составляющая и что определяет в движении
2. Ритм движения: определение понятия. Что отражает ритм и как он связан с фазами движения
3. Положение в пространстве системы тел, которая может менять свою конфигурацию
4. Связь изменения кинетической энергии с работой внешних и внутренних сил
5. Закончите предложение: «при расчете затрачиваемой на движение энергии движение отдельного звена и движение тела в целом рассматривают в виде ….
6. Количественная оценка эффективности механической работы. На какие цели расходуется метаболическая энергия Чему равен коэффициент механической эффективности при ходьбе и беге.
7. Что такое «управляющий момент звена». Приведите формулу расчета управляющего момента звена (анатомический подход). Что обозначает каждый символ в формуле.
1. Ускорение точки - это пространственно-временная мера изменения движения, которая характеризует быстроту изменения скорости по величине и направлению.
Ускорение измеряется отношением изменения скорости (угловой скорости) к затраченному на него времени.
Различают ускорения точки: а) положительное, имеющее одинаковое направление со скоростью, - скорость возрастает; б) отрицательное, имеющее направление, противоположное направлению скорости, - скорость убывает; в) нормальная - скорость прежняя, изменяется направление.
Ускорение — величина векторная, характеризующая быстроту изменения скорости по ее величине и направлению в данный момент (мгновенное ускорение).
Касательное ускорение будет положительным, когда скорость точки увеличивается, и отрицательным, когда она уменьшается. Если касательное ускорение равно нулю, то скорость по величине постоянная. Если нормальное ускорение равно нулю, то направление скорости постоянное.
Угловое ускорение тела определяется как мера быстроты изменения его угловой скорости. Оно равно первой производной по времени от угловой скорости тела:
Различают ускорение тела линейное (в поступательном движении) и угловое (во вращательном движении). Отношение линейного ускорения каждой точки вращающегося тела к ее радиусу равно угловому ускорению (е) в радианах в секунду в квадрате. Значит, линейное ускорение любой точки вращающегося тела равно по величине его угловому ускорению, умноженному на радиус вращения этой точки:
Ускорение системы
 |
тел* изменяющей свою конфигурацию, определяется еще сложнее, чем скорость. Ускорение служит хорошим показателем качества приложенных усилий.
Среднее ускорение за время движения, особенно в тех случаях, когда оно меняет знак, обычно не определяют, поскольку оно не характеризует достаточно подробности (детали) движения.
Численно ускорение характеризуется изменением скорости в единицу времени. Размерность линейного ускорения: В зависимости от способа задания движения вычисление ускорения выглядит следующим образом.
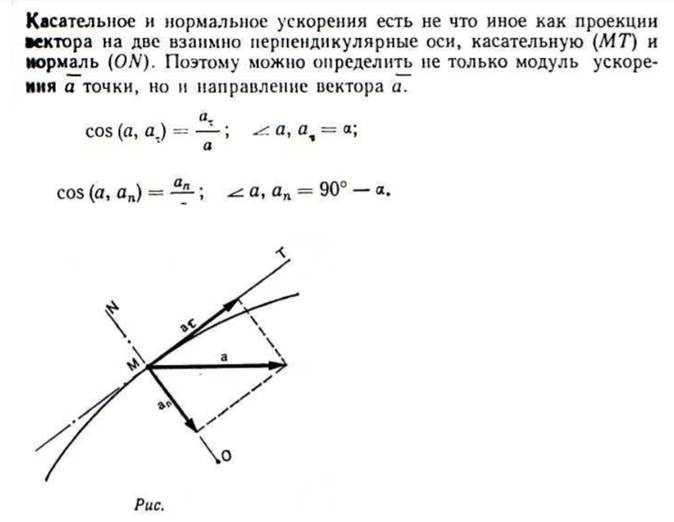
1.) Естественный способ задания движения . Разложим вектор ускорения на две составляющие :одну из них а направим по касательной к кривой , а другую- а – по нормали. Тогда вектор ускорения а можно представить как сумму его составляющих (рис.2 )
а = а + а
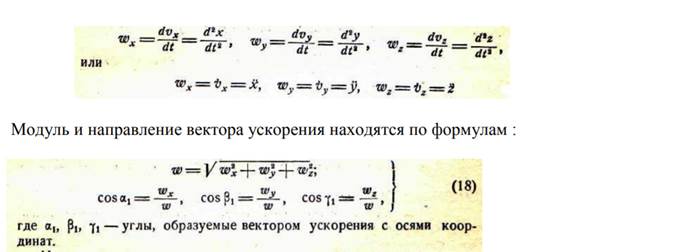
2.) Координатный способ задания движения
Естественный способ весьма нагляден. Однако траектория точки заранее чаще бывает не известна Поэтому на практике чаще используется другой способ- координатный.
Чтобы знать закон движения точки, т.е. ее положение в пространстве в любой момент времени, необходимо знать значения координат точки для каждого момента времени, т..е. знать зависимости:
X = f (t) y = f (t) z = f (t )
Для данного случая вектор ускорения точки равен первой производной вектора скорости по времени
w =dv|dt
Проекции ускорения на оси координат равны первым производным от проекций скоростей или вторым производным от соответствующих координат по времени:
1.) Практически ускорение как и скорость удобно в плоском движении рассчитывать по двум составляющим- горизонтальной и вертикальной (Vx и Vy )
W x (i) = v V x / v t W y (i) = v Vy /v t
Здесь v V(i)- разность первых разностей, или «вторая разность». Эта величина характеризует среднее ускорение на участке пути, например, от 2-ой до 4-ой позы.
Величина, например, равная :
Wx (3) =| V x(4) – V x(2) | / vt
считается мгновенным ускорением в момент промежуточной 3-й позы. -W x(3).
Таким же способом рассчитываются вертикальное ускорение той же точки в то же время. –Wy(i )
2.) Скорости и ускорения – векторные величины. Их можно изобразить на промере в виде стрелок определенного размера (в выбранном масштабе) и соответствующего направления . Вектор строится по правилу треугольника. Гипотенуза треугольника отражает сам вектор, а его катеты- его проекции на оси координат (Vx и Vy ) . Начало вектора располагается в той точке на промере , скорость или ускорение которой они характеризуют. Проекции векторов (катеты треугольника ) строятся с учетом выбранного масштаба и знака изменения vS и vV. Для положительных величин vSx и vVx горизонтальный катет откладывается по ходу движения характерной точки; при отрицательных значениях этих величин – против движения. Соответственно, для положительных vSy и vVy вертикальный катет треугольника направлен из конца горизонтального катета вверх ; при отрицательных значениях этих величин- вниз .
3.) Масштаб векторов скорости и ускорения выбирается с соблюдением следующих условий:
а) масштаб горизонтальной и вертикальной составляющей векторов должен быть одинаковым;
б) масштаб векторов скорости и ускорения выбирается из условия, что длина вектора для наибольшего значения скорости и ускорения не превышает 100 мм.
Следовательно, масштабы скорости и ускорения, как правило, не совпадают. Ориентировочно величину масштаба можно оценить по формуле: М ор. = ( Вmax 1000 ) 100 =10 Вmax Где М ор- ориентировочное значение масштаба; Вmax – максимальное значение скорости или ускорения (м/с) целого числа , оканчивающегося на нуль. Например, Мор= 73,7. Принимаем масштаб скорости (ускорения) равным М=1:70
2. Ритм движений - это временная мера соотношения частей движений. Он определяется по соотношению промежутков времени, затраченного на соответствующие части движения.
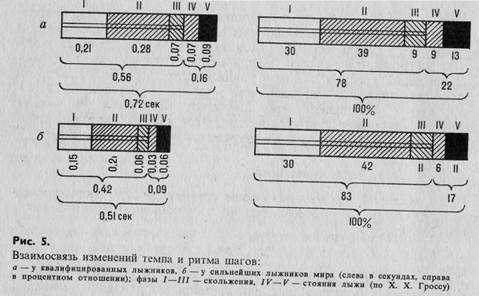
Ритм движений характеризует, например, отношение времени опоры к времени полета в беге или времени амортизации (сгибания колена) к времени отталкивания (выпрямления ноги) при опоре. Примером соотношения длительности и частей движения может служить ритм скользящего шага на лыжах (соотношение длительности пяти фаз шага). С изменением темпа шагов изменяется и их ритм (рис. 5). Кроме временных можно определить еще пространственные показатели ритма (например, отношение длины выпада в шаге на лыжах к длине скольжения). Можно говорить и о ритме ряда фаз (например: соотношение длительностей пяти фаз скользящего шага в лыжном ходе). Ритм бывает постоянным и переменным.
Чтобы определить ритм (временной), выделяют фазы, которые различаются по задаче движения, по его направлению, скорости, ускорению и другим характеристикам. Ритм отражает прилагаемые усилия, зависит от их величины, времени приложения и других особенностей движений. Поэтому по ритму движений можно в известной мере судить об их совершенстве. В ритме особенно важны акценты — большие усилия и ускорения — их размещение во времени. При овладении упражнениями иногда лучше сначала задать ритм, чем подробно описывать детали движений; это помогает быстрее понять особенности изучаемого упражнения, его построение во времени.
В каждом движении есть различающиеся части, например подготовительные и исполнительные (основные) движения, разгон и торможение. Значит, ритм можно определить в каждом упражнении. Так называемые «неритмичные» движения — это не вообще лишенные



ритма движения, а движения с отклонениями от заданного рационального ритма. Иначе говоря, неритмичные движения — это движения без определенного постоянного ритма или с неправильным, нерациональным ритмом.
3. положение в пространстве системы тел, которая может менять свою конфигурацию.
Пространственные характеристики позволяют определять положения, например исходное для движения и конечное (по координатам), и движения (по траекториям).
Движения человека можно изучать рассматривая его тело (в зависимости от поставленных задач) как материальную точку, как одно твердое тело или как систему тел.
Тело человека рассматривают как материальную точку, когда перемещение тела намного больше, чем его размеры (если не исследуют движения частей тела и его вращение).
Тело человека приравнивают к твердому телу, когда можно не принимать во внимание взаимные перемещения его звеньев и деформации тканей, когда важно учитывать лишь его размеры, расположение в пространстве и ориентацию (в частности, при изучении условий равновесия, вращения тела в постоянной позе).
Тело человека изучают как систему тел, когда важны еще и особенности движений звеньев тела, влияющие на выполнение двигательного действия.
Поэтому, определяя основные пространственные характеристики движений человека (координаты и траектории), заранее уточняют, к какому материальному объекту (точке, телу, системе тел) приравнивают в данном случае тело человека.
Координаты точки, тела и системы тел
Координаты точки — это пространственная мера местоположения точки относительно системы отсчета. Местоположение точки определяют измеряя, например, ее линейные координаты
По координатам определяют, где находится изучаемая точка (например, пункт отсчета на теле человека) относительно начала отсчета. Как известно, положение точки на линии определяет одна координата, на плоскости — две, в пространстве — три координаты. Положение твердого тела в пространстве можно определить по координатам трех его точек (не лежащих на одной прямой). Можно также определить местоположение одной из точек тела (по ее линейным координатам) и ориентацию тела относительно системы отсчета (по угловым координатам).
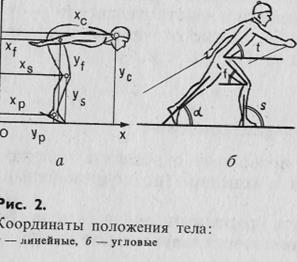
Положение системы тел (звеньев тела человека), которая может изменять свою конфигурацию (взаимное расположение звеньев), определяют по положению каждого звена в пространстве (рис. 2, а). Удобно использовать при этом угловые координаты (рис. 2, 6), например суставные углы, и по ним, устанавливать позу тела как взаимное, расположение его звеньев.
Практически нередко сочетают:
1) определение местоположения какой-либо точки (например, общего центра масс тела или точки опоры);
2) определение позы (взаимного расположения звеньев),
3) определение ориентации тела (по линии отсчета, проведенной в теле).
Изучая движение, нужно определить:
1) исходное положение, из которого движение начинается2;
2) конечное положение, в котором движение заканчивается;
3) ряд мгновенных (непрерывно сменяющихся) промежуточных положений, которые принимает тело при движении.
Кинокадры какого-либо упражнения показывают, как раз такие положения. В механике описать движение (найти закон движения) — значит определить положение любой точки системы в любой момент времени. Иначе говоря, определить в любой момент времени координаты пунктов или линий отсчета, отмеченных на теле, по которым изучают его движение в пространстве.
4. Связь изменения кинетической энергии с работой внешних и внутренних сил
При действии на движущееся тело постоянной по величине и совпадающей по направлению с направлением движения силы, тело либо приобретает определенный запас энергии, либо совершает работу.
Физическая величина, характеризующая способность движущегося тела или системы совершать работу при торможении до полной остановки, называется кинетической энергией. Кинетическая энергия - энергия, которой обладает движущееся тело.
Кинетическая энергия системы равна сумме кинетических энергий отдельных тел (материальных точек) этой системы:
Wk = åWki,
где Wki - кинетическая энергия i-го тела системы.
Изменение кинетической энергии системы при ее переходе из одного состояния в другое происходит под действием приложенных к системе внешних и внутренних сил и равно сумме работ этих сил:
DWk = Wk2 – Wk1 = åAiвнут + åAiвн
Уравнение выражает теорему об изменении кинетической энергии, с помощью которой решаются многие задачи динамики.
Изменение кинетической энергии системы равно сумме изменений кинетических энергий отдельных тел (материальных точек) системы:
Для вывода формулы кинетической энергии системы необходимо рассчитать работу, которая может быть совершена системой при ее торможении до полной остановки. Предположим, что система (твердое тело) состоит из n тел (материальных точек). При поступательном движении твердого тела со скоростью v каждая его материальная точка (элемент тела) движется с такой же скоростью.
Элементарная работа сил трения при торможении, действующих на i-ю материальную точку, равна элементарному изменению кинетической энергии этой точки:

Изменение кинетической энергии материальной точки тела при переходе из одного состояния в другое имеет следующий вид:


Так как материальная точка и состояние тела были выбраны произвольно, то кинетическая энергия i-й материальной точки до начала торможения была следующей:
Рис.2
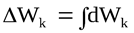
Это справедливо и в том случае, когда тело перемещается из точки  в точку
в точку  (рис.2). При этом совершается работа
(рис.2). При этом совершается работа  под действием силы
под действием силы  . Указанную работу можно представить следующим образом:
. Указанную работу можно представить следующим образом:

Кинетическая энергия тела массой m равна сумме кинетических энергий отдельных материальных точек (частей) этого тела. В рассматриваемом случае
 , (рис.3)
, (рис.3)
где m = åmi - масса тела (системы).
Из формулы (рисю 3) видно, что кинетическая энергия не может быть отрицательной величиной, зависит только от массы движущихся тел и их скорости, но не зависит от того, каким образом данное тело достигло данной скорости.
Таким образом, кинетическая энергия системы (тела) является функцией состояния ее движения. Так как p = mv, то
 . (4)
. (4)
Соотношение (4) устанавливает связь между кинетической энергией тела (системы) и его импульсом.
При скоростях, близких к скорости распространения света в вакууме, кинетическая энергия материальной точки
 , (5)
, (5)
где m0 - масса покоящейся материальной точки (масса покоя);
с - скорость распространения света в вакууме;
m0 c2 = E0 - энергия покоя материальной точки.
При малых скоростях (v<<c) соотношение (5) переходит в формулу (7.30). Так как dWk = dA, то при:
1) dA > 0 - работа совершается над системой – dWk > 0 - кинетическая энергия системы возрастает;
2) dA < 0 - работа совершается системой – dWk < 0 - кинетическая энергия системы убывает;
3) dA = 0 - если система не совершает работу или работа не совершается над системой – dWk = 0 - кинетическая энергия системы не изменяется.
5. Особенностью энергопродукции в биомеханической системе является то, что одна часть энергии при движении расходуется на совершение необходимого двигательного действия, другая идёт на необратимое рассеивание запасённой энергии, третья сохраняется и используется при последующем движении. При расчёте затрачиваемой при движениях энергии отдельного звена и движения тела в целом рассматривают в виде двух более простых видов движения: поступательного и вращательного.
6. Количественная оценка эффективности механической работы. На какие цели расходуется метаболическая энергия ? Чему равен коэффициент механической эффективности при ходьбе и беге?
Мощность механического движения. Коэффициент механической эффективности
Мощность – это работа, выполняемая в единицу времени: 
Можно дать другую формулу мощности: N = FV, где F – действующая сила; V – скорость движения тела.
В биомеханике используют показатель, который называется коэффициентоммеханической эффективности(Кмэ), равный отношению выполненной механической работы к общим энергозатратам (Эз): 
Этот показатель аналогичен коэффициенту полезного действия в технике. Но особенностью Кмэ, присущей живым организмам, является то, что кроме энергозатрат на полезное механическое движение живому организму приходится тратить метаболическую энергию на поддержание функционирования самого организма. В частности энергозатраты идут:
• на основной обмен;
• активность физиологических систем (прежде всего дыхательной и циркуляторной) при мышечной деятельности;
• активность мышц, не участвующих в движении, но обеспечивающих поддержание равновесия, сохранения позы и т. д.;
• работу мышц по преодолению внутреннего трения в суставах, сопротивления разгибателей.
Проводили множество экспериментальных исследований по оценке Кмэ в следующих упражнениях:
• ходьба в диапазоне 4 – 7 км/час (1,1 – 1,9 м/с) - (Кмэ равен 0,35 – 0,40);
• бег в диапазоне от 3 до 9, 16 м/с (Кмэ повышается от 0,45 до 0,7 – 0,8 );
Коэффициент механической эффективности можно использовать как один из критериев совершенствования в движениях: его рост подтверждает правильность методической организации тренировочного процесса конкретного спортсмена.
Классификация кинематических, динамических и энергетических характеристики их единицы измерения
| Биомеханическая характеристика | Для поступательного движения | Для вращательного движения |
| Фазовые характеритики | Длительность: • всего упражнения, с • отдельных фаз движения, с Ритмотемповые характеристики: • темп, N = 1/∆t; (1/c) • ритм, 1/с • цикл, с | |
| Кинематические характеристики | Перемещение, м | Угол поворота, град. |
| Скорость, м/с | Угловая скорость,  , рад/с
Линейная скорость, м/с
Ускорение, , рад/с
Линейная скорость, м/с
Ускорение,  , м/с²
Угловое ускорение, , м/с²
Угловое ускорение,  , рад/с²
Центростремительное ускорение, , рад/с²
Центростремительное ускорение,  , м/с²
Тангенциальное ускорение, , м/с²
Тангенциальное ускорение,  , м/c² , м/c²
| |
| Динамические характеристики | Масса, кг
Сила, F = m•a, H
Импульс тела (количество движения),  , кг•м/с
Импульс силы, , кг•м/с
Импульс силы,  , (F•t), кг•м/с , (F•t), кг•м/с
| Момент инерции,  , кг•м²
Момент силы (вращающий момент), , кг•м²
Момент силы (вращающий момент),  , Н•м
Момент импульса тела (кинетический момент), , Н•м
Момент импульса тела (кинетический момент),  , кг•м²/с , кг•м²/с
|
| Энергетические характеристики | Работа по перемещению тела,  , Дж
Гравитационная потенциальная энергия, : Еп = m • g • h, Дж
Потенциальная энергия упругих тел, , Дж
Гравитационная потенциальная энергия, : Еп = m • g • h, Дж
Потенциальная энергия упругих тел,  , Дж
Кинетическая энергия поступательного движения, , Дж
Мощность поступательного движения, , Дж
Кинетическая энергия поступательного движения, , Дж
Мощность поступательного движения,  , N = FV, Вт , N = FV, Вт
| Работа по вращению тела, Дж
Энергия вращательного движения,  , Дж
Мощность вращательного движения, Вт , Дж
Мощность вращательного движения, Вт
|
7.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|