- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
РАССМОТРЕН УТВЕРЖДАЮ
Министерство образования и науки Донецкой Народной Республики
Структурное подразделение «Дебальцевский колледж
транспортной инфраструктуры»
Государственной образовательной организации высшего профессионального образования «Донецкий институт железнодорожного транспорта»
РАССМОТРЕН УТВЕРЖДАЮ
на заседании ЦК Зам. директора ДКТИ
«Общепрофессиональных дисциплин» ____________ И.Н.Афонина Протокол № 1 «29»августа 2019г.
от «29»августа 2019
Председатель ЦК ________ Т.Е.Бойченко
КОМПЛЕКТ ТЕСТОВЫХ ЗАДАНИЙ
ДЛЯ ПРОВЕДЕНИЯ КОНТРОЛЯ ЗНАНИЙ
ПО ДИСЦИПЛИНЕ ОП.02.«ТЕХНИЧЕСКАЯ МЕХАНИКА»
обучающихся ____курса
по специальностям: 23.02.06 «Техническая эксплуатация подвижного
состава железных дорог» (тяговый подвижной состав)
23.02.06 «Техническая эксплуатация подвижного
состава железных дорог» (вагоны)
08.02.10 « Строительство железных дорог, путь и путевое хозяйство»
Подготовил
Преподаватель Смарский В.Т.
Методика проведения тестирования
Выполнение тестовых заданий рассчитано на 1 час 20 минут.
(одно занятие). Тестирование проводится в целой группе одновременно, обучающиеся которой размещаются по одному за столом. Содержание заданий изложено на отдельных бланках, которые раскладываются при выдаче текстом вниз. Задания выдаются в начале занятия, в течение которого обучающиеся должны отметить в бланках правильный вариант ответа. Ответ отмечается ( ● ) или (٧). С правилами выполнения работы преподаватель знакомит в устной форме.
Тестовые задания выполняются строго, согласно правил, работа над вопросами начинается и заканчивается одновремённо всеми обучающимися, что даёт им равные возможности выявить приобретенный уровень знаний и умений.
Критерии оценивания квалификационной контрольной работы.
Тесты являются одним из способов проверки и оценки результатов обучения.
Во первых, при их применении контроль правильности выполнения упрощается и может бать выполнен в короткий срок.
Во вторых, тесты позволяют более объективно проверить и оценить знания и умения обучающихся.
В третьих, на современный период тесты рассматриваются как наиболее перспективные измерители уровня грамотности обучающихся.
Поэтому формой контрольной квалификационной работы выбрано именно тесты.
Главное в тестах - их стандартизация, убедительный уровень формализации, технологичность – единая процедура проведения проверки и оценки.
Все задания равнозначные для выявления достижения обучающимися уровня подготовки.
Принятые эти критерии оцениваются:
Количество правильных - оценка
ответов
0-20 неудовлетворительно
21-40 удовлетворительно
41-70 хорошо
71-80 отлично
1 Момент сопротивления плоской фигуры измеряется в единицах:
1 - Н·м;
2 - Н·мм;
3 – м3;
4 – м4.
2 Осевой момент инерции плоской фигуры измеряется в единицах:
1 - Н·м;
2 - Н·мм;
3 – м3;
4 – м4.
3 Момент силы относительно точки измеряется в единицах:
1 - Н·м;
2 - Н·мм;
3 – м3;
4 – м4.
4 Абсолютно твердое тело -это:
1 – тело, которое не изгибается;
2 – тело, которое под действием нагрузки не меняет свою форму;
3 – тело, которое не деформируется;
4 – тело, у которого расстояние между двумя любыми точками остаётся неизменным.
5 Эквивалентные системы сил -это:
1 – системы, после приложения которых, тело оказывается в равновесии;
2 – системы, которые действуют на тело как и суммарная сила;
3 – системы, которые оказывают на тело одинаковое воздействие;
4 – системы, под. действием которых тело находится в равновесии.
6 Система сходящихся сил -это:
1 – система, под. действием которой тело находится в равновесии;
2 – система, приложенная к одной точке;
3 – система, линии действия сил которой пересекаются в одной точке;
4 – система, сумма всех сил которой равна нулю.
7 Суммарная сила двух сил приложенных к одной точке равняется:
1 –квадратному корню суммы квадратов двух сил;
2 – диагонали параллелограмма, построенного на этих силах, как на сторонах;
3 – сумме проекций этих сил на ось;
4 – сумме сил, умноженной на косинус угла между ними.
8 Проекция пары сил на ось равняется:
1 – произведению силы на расстояние между силами;
2 – нулю;
3 – сумме двух сил, умноженной на плечё действия;
4 – сумме сил, умноженных на косинус угла между силами и осью.
9 Для переноса силы параллельно самой себе необходимо:
1 – перенести эту силу по перпендикуляру между начальной и конечной точками;
2 – приложить пару сил, момент которой равняется произведению силы на расстояние переноса силы;
3 – в конечной точке приложить уравновешенную параллельно систему двух противоположных сил, равных первоначальной силе, пара сил от первоначальной силы и уравновешивающей даст момент, который прикладывается после переноса.
4 - к перенесенной силе добавляется уравновешивающая сила.
10 Главный момент -это:
1 – наибольший момент, который действует на тело;
2 – суммарный момент всех моментов, которые действуют на тело;
3 – момент, который действует на тело по часовой стрелке;
4 – момент, который действует на тело против часовой стрелки.
11 Условия равновесия плоской системы произвольно расположенных сил имеют:
1 – два уравнения;
2 – три уравнения;
3 – четыри уравнения;
4 – шесть уравнения.
12 Реакции связей, это:
1 – шнуровые соединения двух тел;
2 – силы, которые противодействуют перемещению тела;
3 – силы и моменты, которые ограничивают перемещение тела;
4 – силы, с которыми связи действуют на тело.
13 Условия равновесия пространственной системы сходящихся сил имеют:
1 – два уравнения;
2 – три уравнения;
3 – четыри уравнения;
4 – шесть уравнений.
14 Условия равновесия пространственной системы произвольно расположенных сил:
1 – два уравнения;
2 – три уравнения;
3 – четыри уравнения;
4 – шесть уравнений.
15 Угол трения, это:
1- угол между основанием конуса трения и его образующей;
2 – угол между поверхностью трения и силой, перемещяющей тело;
3 – угол между нормальной силой и ображующей конуса трения;
4 – угол между силой трения и образующей конуса трения.
16 Сила трения прямопропорциональна:
1 – коэффициенту трения;
2 – силе нормального давления;
3 – силе перемещения;
4 – силе веса тела.
17 Суммарная сила двух параллельных сил равна:
1 – сумме проекций сил на параллельную ось;
2 – произведению суммы сил на расстояние между ними;
3 – разности двух сил;
4 – большей из двух сил.
18 Центр тяжести треугольника находится на пересечении:
1 – высот треугольника;
2 – биссектрис треугольника;
3 – медиан треугольника;
4 – перпендикуляров от средины сторон треугольника.
19 Положение центров тяжести пластин или поперечных сечений, составленных из простых плоских геометрических фигур и стандартных профилей металлопроката определяется как:
1 – среднее значение координат центров тяжести простых фигур, или сечений стандартных профилей проката;
2 – суммам произведений центров тяжести составных фигур на их площади, делённым на сумму площадей всех составных фигур;
3 - суммам произведений центров тяжести составных фигур на их на площади этих фигур делённым на сумму координат центров тяжести составных фигур;
4 – суммам произведений центров тяжести составных фигур на их на площади этих фигур делённым на количество всех составных фигур.
20 Кинематика, это наука, которая изучает движение тел и материальных точек:
1 – с учётом их веса;
2 – без учёта их веса и сил, действующих на них;
3 – с учётом сил, действующих на них;
4 – с учётом сил инерции.
21 Равновесие тела, это:
1 – когда тело не двигается;
2 – состояние покоя тела, или равномерного прямолинейного движения;
3 - состояние покоя тела, или равномерного вращательного движения;
4 - состояние покоя тела, или равноускоренного прямолинейного движения;.
22 Ускорение точки равняется:
1 – первой производной пути по времени;
2 – первой производной скорости по времени;
3 - второй производной скорости по времени;
4 – интегралу скорости.
23 По какой траектории двигается тело и чему равняется ускорение S=2t3 м:
1 – парабола, ускорение равняется 12 м/с2 constanta;
2 – гипербола, ускорение – линейная зависимость a=12t м/с2;
3 – кубическая парабола, ускорение – линейная зависимость a=12t м/с2;
4 – кубическая парабола, ускорение равняется 12 м/с2 constanta.
24 При наличии ускорения aτ=0; an=constanta движение:
1 – равномерное прямолинейное;
2 – равномерное криволинейное;
3 – равномерное по окружности;
4 – равноускоренное по окружности.
25 Формула  представляет собой:
представляет собой:
1 - закон поступательного движения;
2 – полный закон поступательного движения;
3 – полный закон вращательного движения;
4 – закон равномерного вращательного движения.
26 Угловая скорость измеряется в:
1 – обороты/мин;
2 – рад/с;
3 – обороты/с;
4 – м/с.
27 По второму закону динамики сила прямопропорциональна:
1 – ускорению движения тела;
2 – времени действия силы;
3 – произведению массы на квадрат скорости;
4 – квадрату скорости.
28 По третьей аксиоме динамики движение тела:
1 – не зависит от действия на него сил;
2 – если на тело действуют несколько сил, от движение тела складывается из движений от действия каждой из сил в отдельности;
3 - если на тело действуют несколько сил, то его движение складывается из движения от действия суммарной силы системы сил;
4 - если на тело действуют несколько сил, то его движение складывается из движения от наибольшей силы.
29 При равномерном криволинейном движении тела на него действует сила инерции, которая:
1 –равна произведению массы тела на касательное ускорение;
2 - равна произведению массы тела на нормальное ускорение;
3 – направлена к центру кривизны;
4 – равна произведению массы тела на ускорение свободного падения.
30 Работа при прямолинейном движении равняется:
1 – произведению массы тела на расстояние перемещения тела;
2 – произведению силы, действующей на тело, на расстояние, на которое тело переместилось и разделенное на время перемещения тела;
3 – произведению силы, действующей на тело на косинус угла между направлением действия силы и направлением перемещения, на расстояние перемещения;
4 – произведению разницы силы, действующей на тело и силы трения на косинус кута между действующей силой и направлением перемещения, на расстояние перемещения.
31 КПД работы равняется:
1 – разности между затраченной и полезной работами;
2 – полезной работе;
3 – отношению полезной работы к затраченной;
4 – отношению затраченной работы к полезной.
32 КПД последовательно включенных устройств равно:
1 – сумм КПД всех устройств;
2 – произведению КПД всех устройств;
3 – наименьшему КПД последовательной линии;
4 – среднему значению КПД устройств.
33 Крутящий момент тяговых агрегатов при одинаковой мощности зависит от:
1 - диаметра тягового колеса;
2 – диаметра вала тягового колеса;
3 – количества оборотов тягового колеса;
4 – направления вращения тягового колеса.
34 Формула  означает:
означает:
1 – линейное ускорение;
2 – кинетическую энергию;
3 – потенциальную энергию;
4 – количество движения.
35 Величина момента инерции  относительно оси зависит от:
относительно оси зависит от:
1 – площади сечения и квадрата расстояния сечения до центра тяжести от этой оси;
2 – от положения оси ОУ;
3 – от длины стержня, сечение которого рассматривается;
4 – от силы, действующей на сечение.
36 Деформация, это:
1 - изменение состояния тела под действием нагрузки;
2 – изменение размеров и формы тела под действием нагрузки;
3 – изменение положения тела под действием нагрузки;
4 – изменение положения оси тела под действием нагрузки.
37 Сопротивление материалов, это наука, изучающая расчёты конструкций на:
1 – твёрдость, нагружения, размеры;
2 - прочность, жесткость, устойчивость;
3 – сопротивление деформациям и прочность;
4 – сопротивление изменению формы и размеров по действием нагрузки.
38 Допущения сопротивления материалов по материалам:
1 – материалы сплошные, однородные, изотропные;
2 – материалы без трещин, вкраплений, однородные;
3 – материалы без примесей, пустот, сопротивляются одинаково во се стороны;
4 – материалы сопротивляются нагрузкам одинаково в разные стороны.
39 Допущения принципу независимости действия сил оговаривает:
1 – нагрузки кействуют по всему телу независимо от их места действия;
2 – если на тело действуют несколько нагрузок, то его деформация сложится из деформаций, которые имело бы тело под действием каждой из нагрузок в отдельности;
3 - если на тело действуют несколько нагрузок, то его деформация сложится из деформаций, которые имело бы тело от суммарной нагрузки;
4 - если на тело действуют несколько нагрузок, то его деформация сложится из деформаций, которые имело бы тело от наибольшей нагрузки.
40 В сопротивлении материалов силу, действующую на тело, переносить:
1 – можно только по линии действия силы;
2 – можно на малую величину;
3 – нельзя никогда;
4 – можно в границах твёрдого тела.
41 В методе сечений присутствуют внутренние силовые факторы:
1 – один;
2 - три;
3 – четири;
4 – шесть.
42 В формуле  определяется :
определяется :
1 – давление;
2 – напряжение;
3 – удельная сила к площади сечения;
4 – мощность.
43 Напряжение σ действует относительно поперечного сечения:
1 – касательно;
2 – нормально;
3 – под углом действия внешней силы;
4 – по периметру сечения.
44 Символы  и
и  означают:
означают:
1 – действующие напряжения;
2 – предельные напряжения;
3 – допускаемые напряжения;
4 - фактические напряжения.
45 При сжатии в поперечном сечении действуют внутренние силовые факторы и напряжения:
1 – поперечная сила и касательное напряжение;
2 – продольная сила и касательное напряжение;
3 – поперечная и продольная силы и нормальное напряжение;
4 – продольная сила и нормальное напряжение.
46 Закон Гука при растяжении говорит:
1 – в пределах упругих деформаций продольная сила прямопропорциональна продольной деформации;
2 – в пределах упругих деформаций продольная сила прямопропорциональна модулю упругости;
3 - в пределах упругих деформаций нормальные напряжения прямопропорциональны продольной деформации;
4 - в пределах упругих деформаций нормальные напряжения прямопропорциональны модулю упругости;
47 Упрочнение стержня за счёт наклёпа происходит на диаграмме σε в пределах:
1 - σпц;
2 - σу;
3 - σТ;
4 - σпр.
48 Формула  обговаривает расчёт:
обговаривает расчёт:
1 – проверка прочности;
2 – проверка на максимальную нагрузку;
3 – определение площади сечения;
4 – проектный расчёт.
49 При срезе в поперечном сечении действуют внутренние силовые факторы и напряжения:
1 – поперечна сила и нормальное напряжение;
2 – продольная сила и касательные напряжения;
3 – поперечная сила и касательные напряжения;
4 – продольная сила и касательные напряжения.
50 По формуле  производится расчёт, n выражает:
производится расчёт, n выражает:
1 – прочность при срезе, n- количество действующих поперечных сил;
2 – прочность при срезе, n- количество соединяющих элементов;
3 – действующее напряжение, n – коэффициент запаса прочности при срезе;
4 – определение максимально допускаемой нагрузки, n- количество действующих поперечных сил.
51 При смятии по формуле  выполняется расчёт:
выполняется расчёт:
1 – определение минимально допустимой площади смятия элемента;
2 – проверка прочности элемента;
3 – конструкторский расчёт;
4 – максимально допускаемая нагрузка.
52 При кручении в поперечном сечении действуют силовые факторы и напряжения:
1 – поперечная сила и касательное напряжение τ;
2 – изгибающая сила и нормальное напряжение σ;
3 – крутящий момент и касательное напряжение τ;
4 – продольная сила, крутящий момент и касательное напряжение τ.
53 Закон Гука для кручения говорит:
1 – в пределах упругих деформаций возникают нормальные напряжения, которые прямопропорциональны поперечным деформациям;
2 – в пределах упругих деформаций возникают касательные напряжения, пропорциональные касательным деформациям;
3 – в пределах упругих деформаций возникают касательные напряжения, прямопропорциональные углу закручивания;
4 – в пределах упругих деформаций возникают нормальные напряжения, прямопропорциональные углу закручивания;
54 Формула  говорит, что при кручении в поперечном сечении:
говорит, что при кручении в поперечном сечении:
1 – максимальное значение касательного напряжения находится в центре сечения;
2 - максимальное значение касательного напряжения на периметре сечения;
3 – минимальное значение касательного напряжения находится в центре сечения;
2 - минимальное значение касательного напряжения находится на периметре сечения.
55 Формулой  при кручении выполняется расчёт:
при кручении выполняется расчёт:
1 – статической прочности поперечного сечения;
2 – конструкторский расчёт;
3 – определение максимально допустимого нагряжения;
4 – определение действующего напрядения.
56 Формулой  при кручении определяется расчёт:
при кручении определяется расчёт:
1 – определение угла закручивания на единицу длины;
2 – проверка жесткости;
3 – определение допускаемого угла закручивания на единицу длины;
4 – определение максимально допускаемой нагрузки.
57 При прямом поперечном изгибе в поперечном сечении действуют:
1 – изгибающий момент и касательное напряжение;
2 – поперечная сила и касательные напряжения;
3 – изгибающий момент, поперечная сила и нормальные напряжения;
4 - изгибающий момент, поперечная сила и касательное напряжение.
58 Правило знаков при построении эпюр поперечных сил при изгибе:
1 при рассмотрении балки слева направо, силы, направленные вверх принимаются со знаком (+), направленные вниз, со знаком (-);
2 - при рассмотрении балки слева направо, силы, направленные вверх принимаются со знаком (-),направленные вниз, со знаком (+);
3 - при рассмотрении балки справа налево, силы, направленные вверх принимаются со знаком (+),направленные вниз, со знаком (-);
4 - при рассмотрении балки справа налево, силы, направленные вверх принимаются со знаком (-),направленные вниз, со знаком (-);
59 При построении эпюр изгибающих моментов при изгибе правило знаков:
1 – при растяжении нижних волокон балки знак(+), верхних, знак (-);
2 - при растяжении нижних волокон балки знак (-),верхних, знак (+);
3 – когда момент слева поворачивает балку по часовой стрелке (-);
4 – когда справа момент поворачивает против часовой стрелки (-).
60 При контроле построенных эпюр при изгибе, когда участок загружен равномернораспределённой нагрузкой:
1 – эпюра изгибающих моментов имеет линейную зависимость, а эпюра поперечных сил constanta;
2 – эпюра изгибающих моментов имеет вид параболы с выпуклостью навстречу нагружению, а эпюра поперечных сил линейную зависимость;
3 - эпюра изгибающих моментов constanta, а эпюра поперечных сил равна нулю;
4 - эпюра изгибающих моментов имеет линейную зависимость, а эпюра поперечных сил constanta.
61 В формуле  при изгибе видно, что:
при изгибе видно, что:
1 – максимальное значение нормальных напряжений находится в центре сечения;
2 - максимальное значение нормальных напряжений находится на периметре сечения;
3 – минимальное значение нормальных напряжений находится в центре сечения;
2 - минимальное значение нормальных напряжений находится на периметре сечения.
62 Четвёртая гипотеза Бернулли гласит о:
1 – ненажатии волокон друг на друга;
2 – линейность деформации волокон;
3 – напряжения во всех волокнах, расположенных на одной высоте одинаковые;
4 – сечения плоские и перпендикулярные оси бруса до изгиба, остаются плоскими и перпендикулярными оси бруса после изгиба.
63 Для определения момента сопротивления относительно оси ОХ прямоугольника правильная формула:
b  Y
Y
 h 1 -
h 1 -  ;
;
 x 2 -
x 2 -  ;
;
3 -  ;
;
4 -  .
.
64 При совместном действии изгиба и кручения эквивалентный момент находится по формуле  согласно:
согласно:
1 – первой гипотезе;
2 – второй гипотезе;
3 – третьей гипотезе;
4 – четвёртой гепотезе.
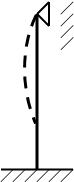
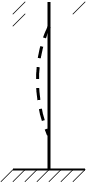
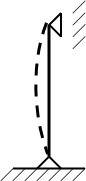
65 Согласно рисунка для для определения закрепления стержня неверное значение μ в варианте:
 F
F

 μ – коэффициент закрепления.
μ – коэффициент закрепления.



 F F F
F F F
 |  | ||||||
 | |||||||
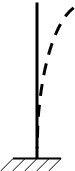 | |||||||
μ=2 μ=1,5 μ=0,7 μ=0,5
1 – первый;
2 - второй;
3 – третий;
4 – четвёртый.
66 Машины – двигатели, это машины, которые:
1 – работают на жидких видах топлива;
2 – перевозят грузы;
3 – преобразовывают различные виды энергии в механическую энергию;
4 – преобразовывают механическую энергию в другие виды энергии.
67 Прочность детали, это её способность:
1 – выполнять большие нагрузки;
2 – быть износоустойчивой;
3 – износоустойчивость, теплоустойчивость и виброустойчивость;
4 – не разрушаться или не получать пластических деформаций под действием нагрузок.
68 К разъёмным соединениям относятся:
1 – пайка, склеивание;
2 – сварные;
3 – резьбовые;
4 – заклёпочные.
69 Механизмы служат для преобразования:
1 – одного вида энергии в другой вид энергии;
2 – скорости поступательного движения;
3 – преобразования одного вида движения в другой вид движения;
4 – преобразования вращательного движения в поступательное.
70 Кривошипно-шатунный механизм преобразовывает:
1 – поступательный вид движения в возвратно-поступательный;
2 - возвратно-поступательное движение в поступательное;
3 - возвратно-поступательное движение в колебательное;
4 – вращательное движение в возвратно-поступательное и наоборот.
71 К фрикционным передачам не относятся:
1 – ременные передачи;
2 – тормозные механизмы;
3 – цепные передачи;
4 – муфты сцепления.
72 К передаточному отношению не относятся:
1 – отношение оборотов ведущего и ведомого валов;
2 – отношение количества зубьев ведомого и ведущего зубчатых колёс;
3 – отношение диаметров ведущего и натяжного колёс ременной передачи;
4 – отношение оборотов ведущего и промежуточного валов редуктора.
73 Линейная скорость цилиндрических колёс в точке их соприкосновения равна:
1 – нулю;
2 – одинаковая;
3 – зависит от диаметров колёс;
4 – зависит от передаточного отношения.
74 Вариатор, это механизм, который:
1 – изменяет вид движения;
2 – меняет передаточное отношение;
3 – меняет скорость поступательного движения;
4 – меняет угол между ведущим и ведомым валами.
75 Передаточное отношение зубчатых цилиндрических передач с паразитными шестернями:
1 – зависит только от передаточного отношения ведущего и ведомого колёс;
2 – зависит от последовательных передаточных отношений всех пар колёс;
3 – зависит от суммарного передаточного отношения паразитных колёс;
4 - зависит от суммарного передаточного отношения всех колёс.
76 Подрезание ножки зуба колеса выполняется в случае:
1 – больших зубчатых колёс;
2 – на открытых передачах;
3 – при малых количествах зубьев колеса;
4 – на передачах с большим передаточным отношением.
77 Модуль сцепления, это:
1 – отношение  ;
;
2 - отношение  ;
;
3 - отношение  ;
;
4 - отношение  .
.
78 Для особенностей червячных передач неверно:
1 – большое передаточное отношение;
2 – самоторможение;
3 – потери на нагрев ;
4 – большой КПД.
79 Для снижения шума в конических передачах:
1 – колеса помещают у смазке;
2 – колеса изготовляют с широкими зубьями;
3 – колеса изготовляют с криволинейными зубами;
4 – смещают ось шестерни от оси колеса.
80 К передачам винт-гайка не относятся:
1 – простота получения поступательного движения и выигрывание в силе;
2 – плавность, бесшумность;
3 – большой КПД;
4 – возможность выполнять точность перемещения.
81 Оси:
1 – работают на изгиб;
2 – работают на изгиб и кручение;
3 – работают на изгиб, кручение и срез;
4 – работают на изгиб, кручение и смятие.
82 Нагруженные шпоночные соединения работают на:
1 – изгиб и сжатие;
2 – смятие и срез;
3 – изгиб и кручение;
4 – сжатие и кручение.
83 Штифтовые соединения служат для:
1 – крепления деталей с большими нагрузками;
2 – крепления зубчатых колес;
3 – точной фиксации деталей и передачи небольших нагрузок;
4 – точного крепления шкивов и колёс.
84 В цепных передачах передаточное отношение определяется как:
1 – отношение длины цепи к количеству звеньев цепи;
2 – отношение количества зубьев ведомого колеса к количеству зубьев ведущего колеса;
3 – отношению количества звеньев цепи к количеству зубьев ведущей звёздочки;
4 - отношению количества звеньев цепи к количеству зубьев ведомой звёздочки.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|