- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Тестовые задания
Тестовые задания
 1. Какой вид передачи изображен на рисунке:
1. Какой вид передачи изображен на рисунке:
А) зубчатая передача;
Б) червячная передача;
В) ременная передача;
Г) ременная, перекрестная передача.
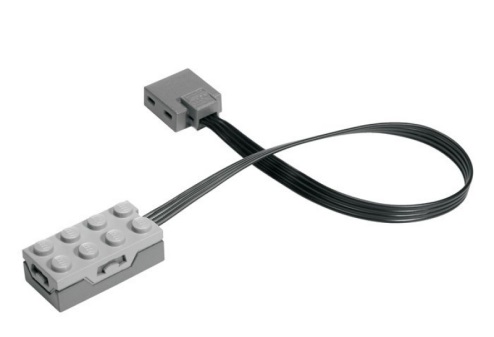
2. Назовите деталь из набора Lego Wedo:
 А) мотор;
А) мотор;
Б) датчик наклона;
В) датчик расстояния;
Г) коммутатор.
 3. Как называется данная деталь:
3. Как называется данная деталь:
А) червячное колесо;
Б) большое зубчатое колесо;
В) малое зубчатое колесо;
Г) коронное колесо.
4. Какая программа задает мотору вращение на строго определенное количество раз:

А) 1;
Б) 2;
В) 3;
Г) 4.
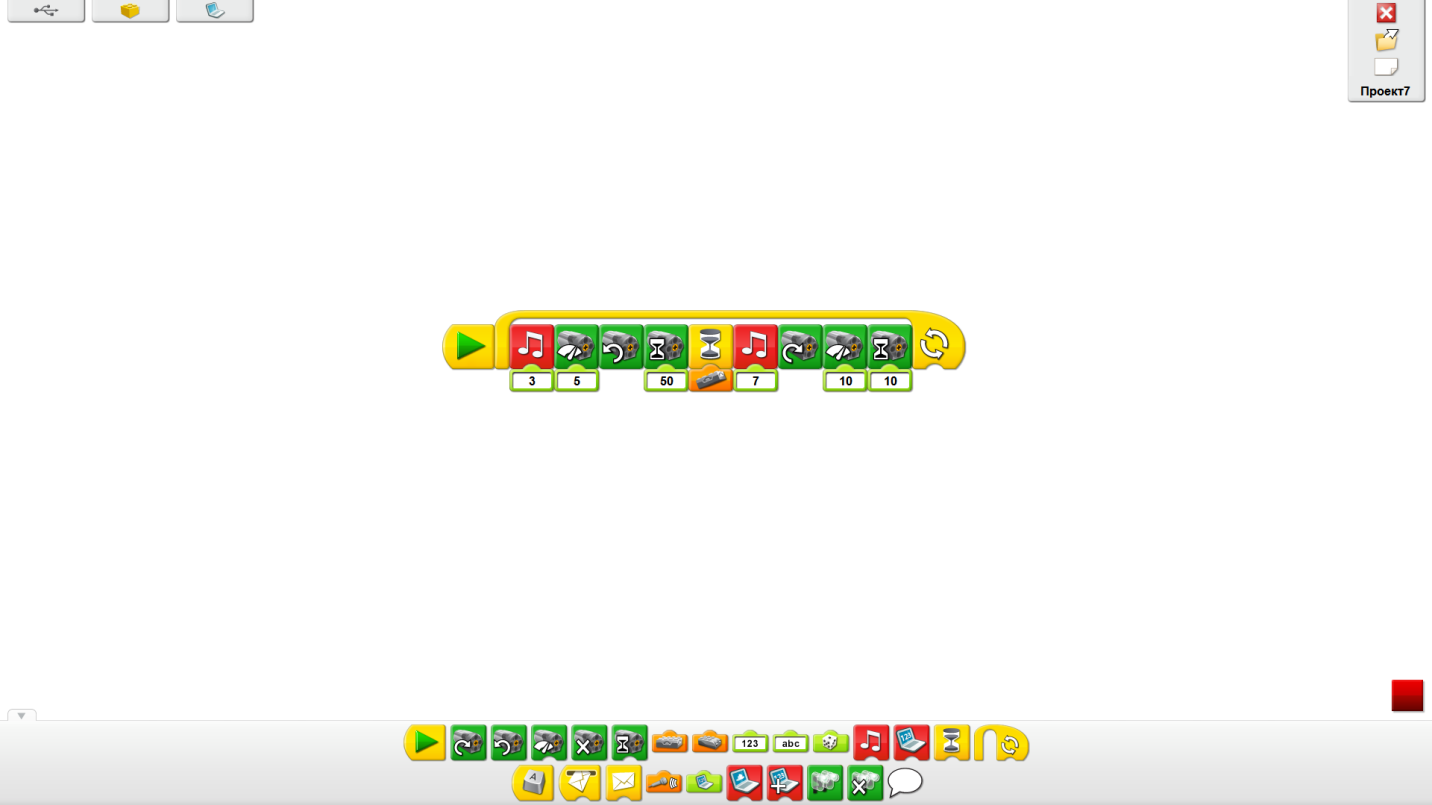
5. Что должно происходить согласно программе, представленной ниже:

А) на экране появляется цифра 10, и она периодически, с интервалом времени 10 с., видна;
Б) на экране появляется цифра 10, и она периодически, с интервалом времени 10 оборотов мотора, видна;
В) на экране появляется цифра 10, и дальше выводится сумма чисел предыдущего с числом 10, с интервалом времени 10 оборотов мотора;
Г) на экране появляется цифра 10, и дальше выводится сумма чисел предыдущего с числом 10, с интервалом времени 10 с.
6. Что должно происходить согласно программе, представленной ниже:

А) на электронную почту отправляется письмо, при доставке которого начинает работать мотор;
Б) дистанционное управление мотором со второго компьютера по Wi-Fi – соединению – мотор, подключенный к первому компьютеру, начинает работать после выполнения первой части команды на втором компьютере;
В) дистанционное управление мотором со второго компьютера по Wi-Fi – соединению – мотор, подключенный к первому компьютеру, начинает работать после выполнения всей команды на втором компьютере;
Г) управление работой мотора по SMS – сообщению.
7. Согласно программе:
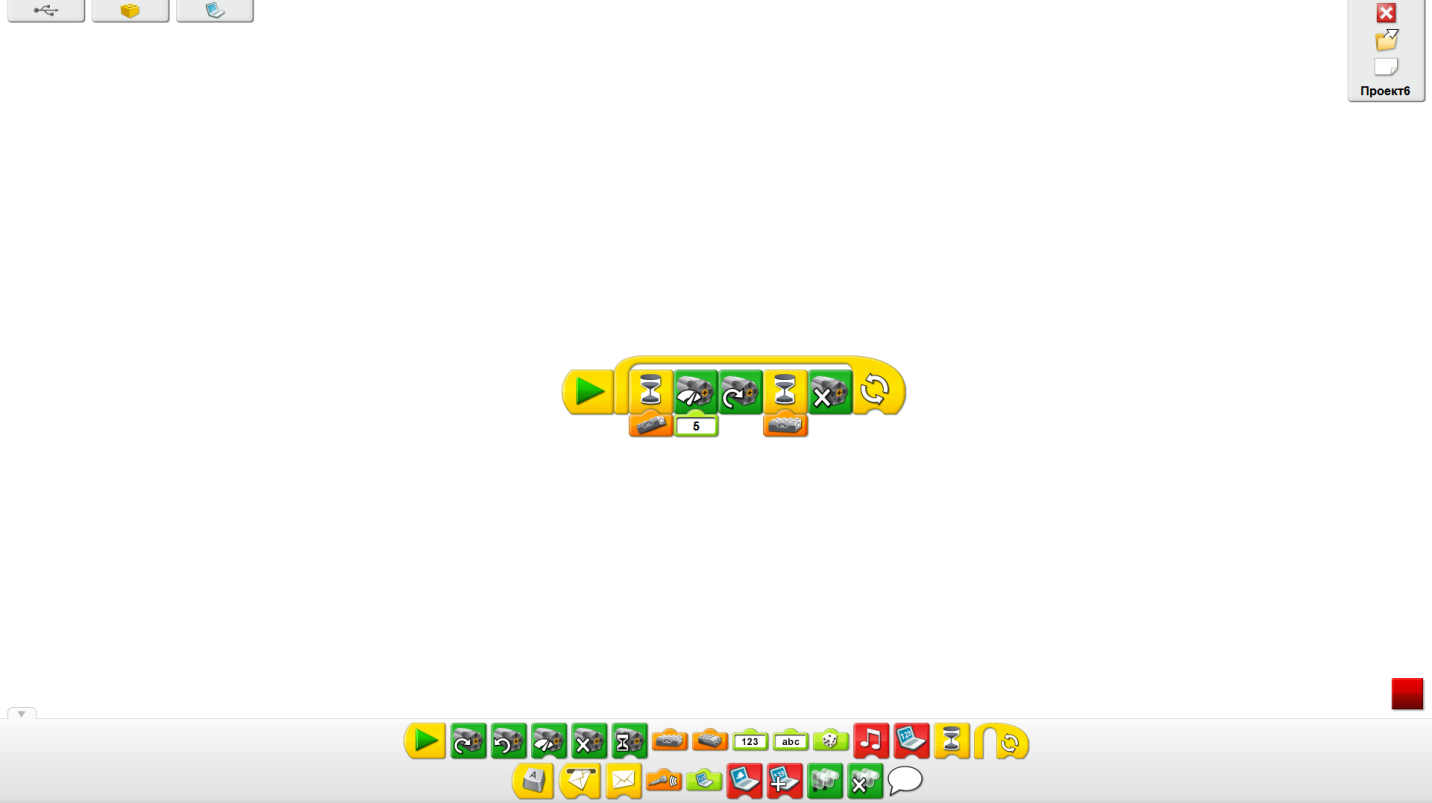
А) мотор начинает вращение по часовой стрелке с мощность 5 при срабатывании датчика расстояния, и мотор не работает, когда датчик расстояния не обнаруживает препятствия;
Б) мотор начинает вращение против часовой стрелки с мощностью 5 при срабатывании датчика расстояния, и мотор не работает, когда датчик расстояния не обнаруживает препятствия;
В) мотор начинает вращение по часовой стрелке с мощностью 5 при срабатывании датчика наклона (наклон 45°) и мотор не работает, когда датчик наклона находится в горизонтальном положении.
8. Мальчик Петя собрал из набора Lego Wedo автомобиль и составил программу. Как будет вести себя автомобиль, согласно этой программе:
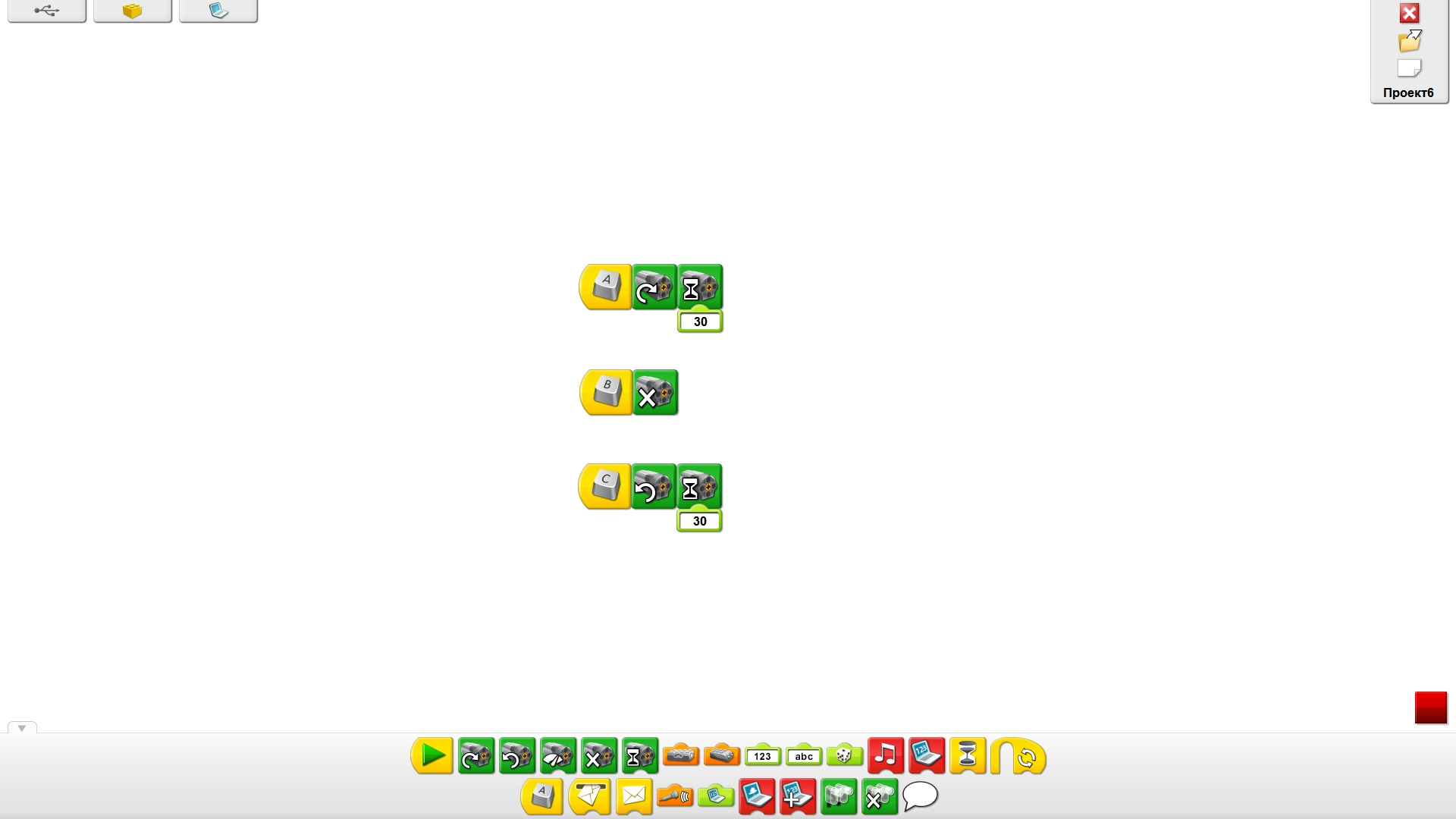
А) при нажатии клавиши «А» автомобиль совершает движение вперед 30 секунд, при нажатии клавиши «В» автомобиль остановится, при нажатии клавиши «С» автомобиль совершает движение назад в течение 30 секунд;
Б) программа не выполнится. Машина останется неподвижной;
В) при нажатии клавиши «А» автомобиль совершает движение вперед 30 оборотов, при нажатии клавиши «В» автомобиль остановится, при нажатии клавиши «С» автомобиль совершает движение назад в течение 30 оборотов;
Г) выполнится только команда с клавишей «А», автомобиль совершит движение вперед 30 оборотов и остановится.
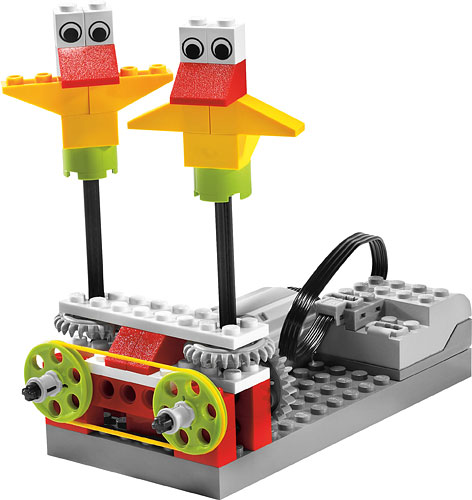
9. Определите тип передачи подвижной части робота:

А) зубчатая;
Б) ременная;
В) перекрестная ременная;
Г) червячная.
10. Датчик расстояния:


А) 1;
Б) 2;
В) 3;
Г) 4.
11. Составлена программа цикл. Определите, сколько раз должна выполниться программа, чтобы мотор совершил ровно 120 оборотов:
А) 1;
Б) 2;
В) 3;
Г) 4.
12. Что будет происходить согласно этой программе:
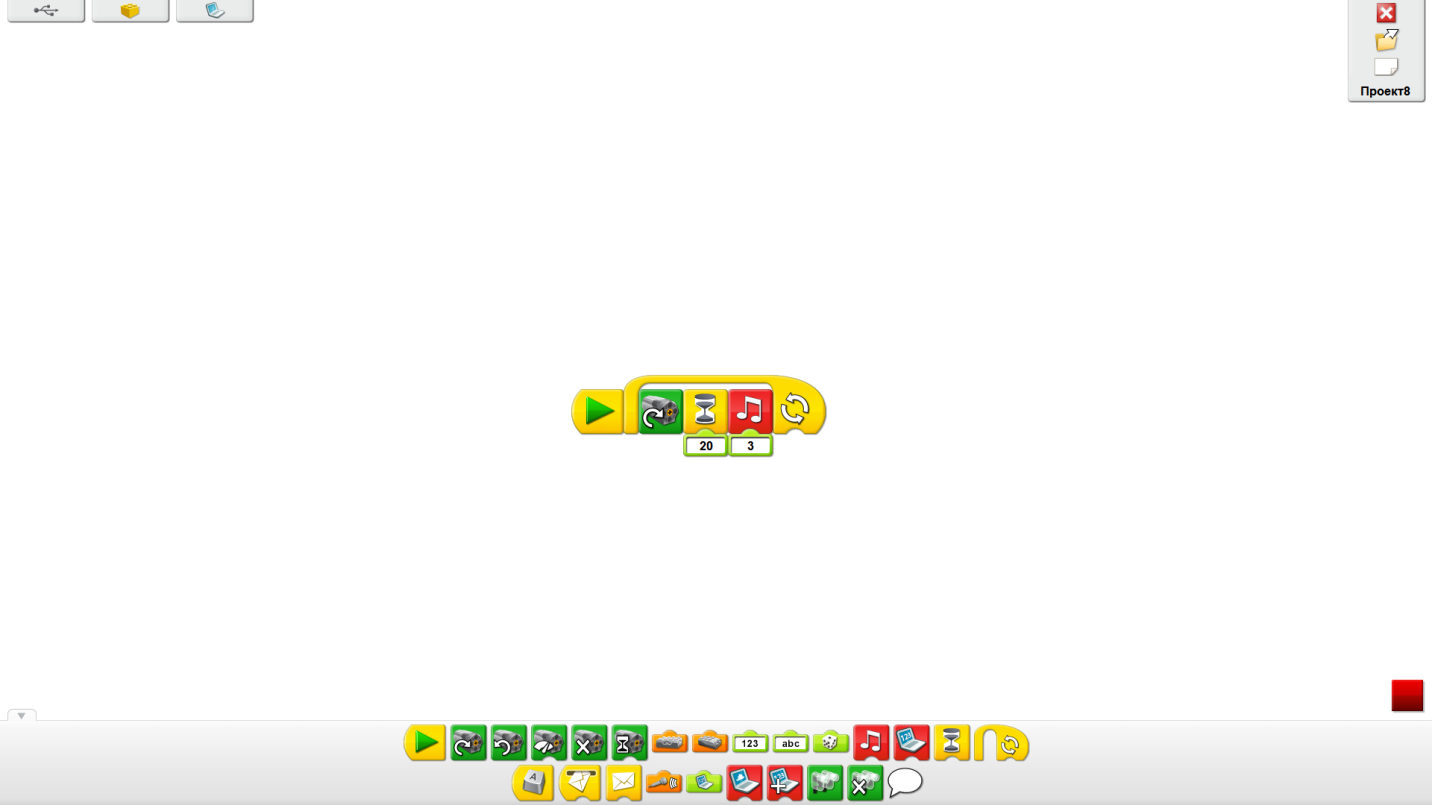
А) циклический процесс вращения мотора 20 с. и звучание мелодии;
Б) циклический процесс вращения мотора 20 оборотов и звучание мелодии;
В) циклический процесс вращения мотора 20 оборотов и звучание мелодии. Цикл совершается 3 раза;
Г) циклический процесс вращения мотора 20 с. и звучание мелодии. Цикл совершается 3 раза.
13. Выберите правильный ответ:

А) циклический процесс вращения мотора 30 оборотов;
Б) циклический процесс вращения мотора 30 с.;
В) циклический процесс вращения мотора 30 оборотов с выпадением случайной мощности мотора;
Г) циклический процесс вращения мотора 30 с. с выпадением случайности мощности мотора.
14. Как называется данная модель:

А) коробка переключения;
Б) коробка передач;
В) кулачковая передача;
Г) зубчатое переключение.
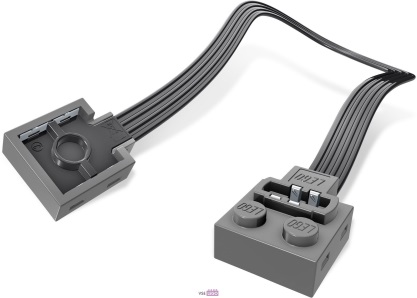
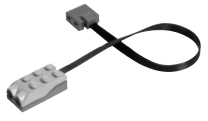
15. Как называется данная модель:

А) датчик наклона;
Б) датчик расстояния;
В) мотор;
Г) USB LEGO-коммутатор.
16. Датчик наклона:
1. 2. 3.


А) 1;
Б) 2;
В) 3.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|