- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Навигация по датчикам расстояния (Ультразвуковая навигация на основе Arduino )
Навигация в помещении
Здания и сооружения вызывают сложности с позиционированием объектом в силу следующий причин:
· многолучевое распространение при отражениях сигнала от стен и других препятствий
· отсутствие прямой видимости
· ослабление из-за препятствий
· повышенные требования к точности сходимости результатов
С другой стороны, позиционирование и навигация внутри помещений может быть упрощена благодаря:
· небольшим зонам покрытия
· стабильным условиям среды (температура, влажность, движение воздуха)
· наличие инфраструктуры для электрического питания, доступа к интернет, точек для установки
· сравнительно низкие скорости движущихся объектов
Для навигации используют различные датчики, на открытом пространстве отлично подходит GPS навигация, но в помещении сигнал от спутников не проникает. Для навигации в помещении можно выделить несколько основных вариантов реализации:
· Навигация по заранее заложенному маршруту, используя точные перемещения по энкодерам, встроенные в моторы;
· Навигация по датчикам расстояния, которые постоянно сканируют окружающее пространство (как в роботах-пылесосах);
· Навигация по RFID меткам;
· Навигация с использованием модуля акселерометра/гироскопа.
Каждый из вариантов имеет свои преимущества и особенности. Рассмотрим часть из них.
Навигация по датчикам расстояния (Ультразвуковая навигация на основе Arduino )
Это устройство предназначено для построения карты местности, точнее закрытого помещения (комнаты, например) вместе с находящимися в нем предметами.
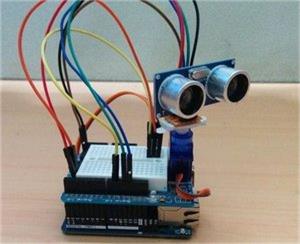 |
Рисунок 1. Ультразвуковая навигация
Принцип работы данного системы навигации заключается в сканировании вращающимся датчиком ультразвука окружающих предметов. Результат которого может быть преобразован в карту местности:
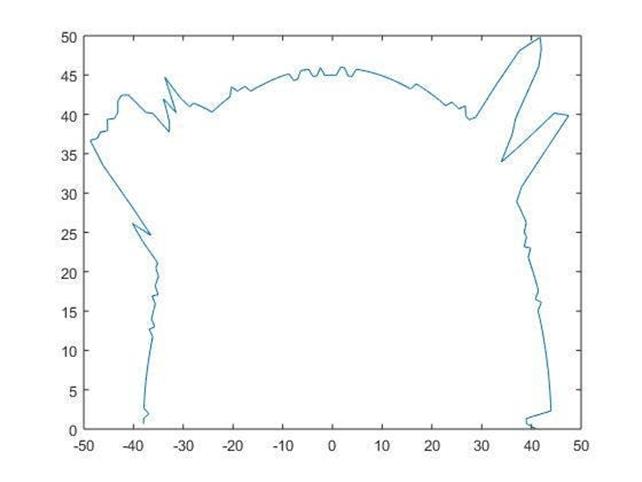
Рисунок 2. Результат обработки информации от датчика ультразвука
Как мы видим, результат сканирования достаточно грубо передаёт очертания помещения, так как датчик ультразвука сам по себе работает с погрешностями и очень плохо определяет дальность в зависимости от угла между датчиком и предметов (ультразвук отражается). А также точность показаний зависит от материала поверхности (меняются свойства отражения и поглощения ультразвука).
Данный способ навигации широко применяется в простейших роботах (роботы-пылесосы), задачей которых является объезд препятствий.
 |
Рисунок 3. Маршрут робота-пылесоса
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|