- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Сила, действующая на МТ, пропорциональна массе точки и ускорению, сообщаемому точке приложенной к ней силой
Первый закон динамики (закон инерции)
Описывает простейшее из возможных механических движений МТ в условиях полной ее изолированности от влияния на нее других материальных тел.
Всякая изолированная МТ, то есть точка, не подверженная воздействию каких-либо других материальных объектов, по отношению к неподвижной системе отсчета может находиться только в состоянии равномерного прямолинейного движения (v=const) или состоянии покоя (v=0).
Применение первого заона динамики
Свойство МТ сохранять состояние своего движения неизменным при отсутствии сил, действующих на нее, или при их равновесии называется ее инерцией.
Система отсчета, по отношению к которой справедлив закон инерции, называется основной, или инерциальной, системой, движение относительно этой системы называется абсолютным.
Любая система отсчета, движущаяся относительно инерциальной поступательно, прямолинейно, равномерно, является также инерциальной. С достаточным для практических решений приближением за инерциальную систему отсчета принимается система, неподвижно связанная с Землей.
Второй закон динамики
Второй закон (основной закон динамики).
Причиной нарушения инерционного состояния МТ, то есть появления ее ускорения, является воздействие на нее других материальных тел или точек. Характеристика этого воздействия представляет собой векторную величину, называемую силой, приложенной к данной точке.
Применение второго закона динамики
Силу характеризуют: 1) направление воздействия на данную точку со стороны другой точки или тела; 2) интенсивность воздействия и зависимость ускорения МТ от ее сопротивляемости этому воздействию.
Способность МТ сопротивляться изменению состояния ее покоя или равномерного прямолинейного движения выражает собой инерцию, или инертность. Мерой инертности МТ является ее масса.
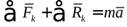
Сила, действующая на МТ, пропорциональна массе точки и ускорению, сообщаемому точке приложенной к ней силой
F=kmw
где F - вектор силы, m - масса МТ, w - вектор ускорения, k - коэффициент пропорциональности.
С выбором единиц силы, массы и ускорения таким, чтобы k=1, получим выражение основного закона динамики в виде
F=mw,
где w - абсолютное ускорение точки, то есть ускорение по отношению к инерциальной системе отсчета.
Таким образом, массу точки можно определить по тому ускорению, которое она получает при действии известной силы.
Вблизи поверхности Земли ускорение свободного падения тел g=const, а сила, сообщающая телу это ускорение, называется весом, то есть P=mg. Отсюда вытекает понятие весомой массы m=P/g.
Третий закон динамики
Третий закон (закон равенства действия и противодействия).
Этот закон рассмотрен ранее как IV-я аксиома статики.

Силы взаимодействия двух МТ действуют по одной прямой, противоположно направлены и численно равны между собой
F12=-F21
Применение третьего закона динамики
Каждую из сил можно представить F21=m1w1, F21=m2w2, а так как F12=F21, то m1w1=m2w2, откуда w1/w2=m2/m1, то есть модули ускорений, сообщаемых друг другу материальными точками при взаимодействии, обратно пропорциональны их массам.
Четвертый закон динамики
Четвертый закон (закон независимости действия сил).
Материальная точка под действием нескольких сил получает ускорение, равное геометрической сумме тех ускорений, которые она получает от каждой силы, действующей отдельно, независимо от других.
Иначе, система сил, приложенных к одной МТ, динамически эквивалентна одной равнодействующей силе, равной главному вектору системы сил.
Применение четвертого закона динамики
Пусть на МТ массой m действуют силы F1, F2,..., Fn, сообщая ей ускорение w. При этом каждая из сил сообщает 3ускорения w1, w2,..., wn. Ускорение при действии нескольких сил является вектороной суммой ускорений, созданнх отдельными силами, то есть
w=w1+w2+... +wm
Умножим обе части этого выражения на m
mw=mw1+mw2+... +mwn,
где mw1=F1, mw2=F2, ... , mwn=Fn.
Тогда
mw= F1+F2+... +Fn
следовательно,
mw=R
где обозначено R=F1+F2+... +Fn
Получено основное уравнение динамики для случая одновременного действия нескольких сил. Под силой R подразумевается равнодействующая всех сил, действующих на МТ
9. 2. Свободная и несвободная точки
+Материальная точка, движение которой в пространстве не ограничено какими-либо связями, называется свободной. Примером свободной материальной точки может служить искусственный спутник Земли в околоземном пространстве или летящий самолет. Их перемещение в пространстве ничем не ограничено, поэтому летчик на спортивном самолете способен проделывать различные сложные фигуры высшего пилотажа.
Задачи динамики сводятся к двум основным:
1) задается закон движения точки, требуется определить действующую на нее силу или систему сил (первая задача динамики);
2) задается система сил, действующая на точку, требуется определить закон движения (вторая задача динамики).
Обе задачи динамики решаются с помощью основного закона динамики, записанного в форме  или
или  .
.
Материальная точка, свобода перемещения которой ограничена наложенными связями, называется несвободной. Примером несвободной материальной точки может служить движущийся по рельсам трамвай, если пренебречь его формой и размерами. Для несвободной материальной точки все внешние силы необходимо делить на две категории: активные (движущие) силы и реакции связи (пассивные силы). В связи с этим первая задача динамики несвободной точки сводится к определению реакций связей, если заданы законы движения точки и действующие на нее активные силы. Вторая задача динамики сводится к тому, чтобы, зная действующие на точку активные силы, определить, во-первых, закон движения точки и, во-вторых, реакции связей.
Если несвободную материальную точку освободить от связей и заменить связи их реакциями, то движение точки можно рассматривать как свободное, а основному закону динамики придать такой вид:
 ,
,
где  – активные силы;
– активные силы;
 – реакции связей;
– реакции связей;
m – масса точки;
 – ускорение точки, полученное в результате действия внешних сил (активных и пассивных).
– ускорение точки, полученное в результате действия внешних сил (активных и пассивных).
9. 3. Силы инерции
Сила, численно равная произведению массы материальной точки на приобретенное ею ускорение и направленная в сторону, противоположную ускорению, называется силой инерции(рис. 9. 3):
 .
.
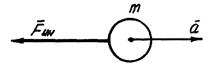
Рис. 9. 3. Сила инерции
Сила инерции в действительности не приложена к получившей ускорение материальной точке, а действует на точку или тело, которое сообщает ускорение этой точке.
Поясним это несколькими примерами.
Тяжелый груз, масса которого m, висит на непрочной, но способной выдержать натяжение R = G нити (рис. 9. 4, а). Если теперь резко потянуть нить вертикально вверх, то она может оборваться (рис. 9. 4, б). На нить начинает действовать дополнительная сила инерции  , численно равная
, численно равная  , противодействующая выходу груза из состояния инерции (рис. 9. 4, в). Нить может оборваться и в том случае, если толкнуть в горизонтальном направлении подвешенный груз, заставив его раскачиваться на нити (рис. 9. 4, г).
, противодействующая выходу груза из состояния инерции (рис. 9. 4, в). Нить может оборваться и в том случае, если толкнуть в горизонтальном направлении подвешенный груз, заставив его раскачиваться на нити (рис. 9. 4, г).
При криволинейном движении материальной точки (рис. 9. 5) у нее возникает ускорение  , которое обычно заменяют двумя составляющими ускорениями:
, которое обычно заменяют двумя составляющими ускорениями:  (нормальное ускорение) и
(нормальное ускорение) и  (касательное ускорение). Поэтому при криволинейном движении материальной точки возникают две составляющие силы инерции
(касательное ускорение). Поэтому при криволинейном движении материальной точки возникают две составляющие силы инерции  : нормальная (иначе центробежная) сила инерции
: нормальная (иначе центробежная) сила инерции

и касательная (иначе тангенциальная) сила инерции

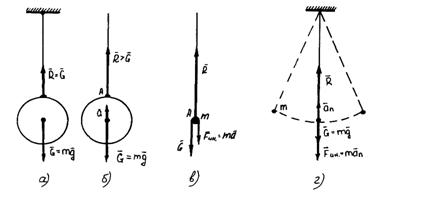
а б в г
Рис. 9. 4. К анализу дейсвия сил инерции

Рис. 9. 5. Векторы ускорений и сил инерции
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|