- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
габаритний тунель (див. рис. 4.11) – стояки (стовпці) з поворотними обмежувачами; 7 страница
Екстрене гальмування характеризується зупинним і гальмівним шляхами. Під зупинним шляхом розуміють віддаль, яку подолає транспортний засіб від моменту виявлення водієм перешкоди до моменту зупинки. Гальмівним шляхом називають частину зупинного шляху, який долає транспортний засіб за час дії на нього гальмівних сил до повної зупинки.
5.2.3 Методи визначення ефективності гальмівних систем
Ефективність гальмівних систем визначають при різних випробуваннях, у тому числі:
– щоденній перевірці автомобілів;
– дорожніх випробуваннях;
– державних випробуваннях.
5.2.3.1 У процесі щоденної експлуатації гальмівні якості автомобілів погіршуються в результаті зношування гальмових механізмів, шин і інших факторів. Тому ще Мінавтотранс СРСР разом з ДАІ розробили нормативи ефективності дії робочих гальмівних систем автомобілів, що перебувають в експлуатації (див. табл. 3.1). Згідно з цими нормативами в АТП проводиться щоденна перевірка автомобілів перед випуском на лінію, а також автомобілів, які пройшли технічне обслуговування і ремонт.
Перевірка робочої гальмівної системи проводиться одноразовим натисненням педалі ненавантаженого транспортного засобу, який рухається з швидкістю 30 км/год по горизонтальній ділянці дороги з твердим покриттям, і коефіцієнт зчеплення якої не менше як 0,6.
Для визначення сповільнення використовують прилад деселерометр, який встановлюється на підлозі кабіни автомобіля або салону автобуса. За відсутності приладу максимальне сповільнення можна визначити приблизно за формулою:
 м/с2,
м/с2,
де φ – коефіцієнт зчеплення коліс з дорогою;
g – прискорення вільного падіння, м/с2;
КЕ – коефіцієнт ефективності гальмування, який залежить від φ, навантаження, швидкості автомобіля і т.д. Орієнтовні значення коефіцієнта КЕ для різних транспортних засобів наведені в таблиці 5.1.
Ефективність стоянкової гальмівної системи визначають на такій же дільниці дороги при рухові з швидкістю 15 км/год плавним затягуванням важеля стоянкового гальма, в результаті чого сповільнення має бути не менше 2 м/с2, а гальмівний шлях – не більше 6м.
Таблиця 5.1 – Нормативи ефективності дії гальмівних
систем автомобілів (в дужках – з навантаженням)
| Автомобілі | Гальмівний шлях, м, не більше | Максимальне сповільнення, м/с2 не менше | Коефіцієнт ефективності гальмування КЕ, при φ=0,7 |
| 1. Легкові автомобілі і їх модифікації | 7,2 | 5,8 | 1,1...1,15 (1,15...1,2) |
| 2. Вантажні вантожопідйом-ністю до 4,5т і автобуси довжиною до 7,5м | 9,5 | 5.0 | 1,1...1,3 (1,5...1,6) |
| 3. Вантажні вантажопід-йомністю більше 4,5т і авто-буси довжиною більше 7,5м | 11,0 | 4,2 | 1,4...1,6 (1,6...1,8) |
5.2.3.2 При дорожніх випробуваннях ефективність робочої гальмівної системи регламентована п.31.4.1 ПДР і повинна відповідати нормам, наведеним у таблиці 5.2. Значення гальмівного шляху вказані для транспортних засобів в спорядженому стані з врахуванням маси водія.
Випробування робочої гальмівної системи проводять на горизонтальній ділянці дороги з рівним сухим чистим цементно- або асфальтобетонним покриттям при початковій швидкості руху 40 км/год – для автомобілів, автобусів і автопоїздів; 30км/год – для мотоциклів, мопедів (при одночасній дії на ручний і ножний гальмові приводи). При цьому траєкторія рухутранспортних засобів у процесі сповільнення повинна залишатися прямолінійною з дозволеним розворотом на кут не більше 80 і виходом з коридору руху шириною не більше 3,5м без додаткових дій водія на органи рульового керування.
Ефективність стоянкової гальмівної системи повинна забезпечувати нерухомий стан (двигун має бути відключеним від трансмісії):
– транспортних засобів з повним навантаженням – на уклоні не менше ніж 16%;
– легкових автомобілів, їх модифікацій для перевезення вантажів, а також автобусів у спорядженому стані – на уклоні не менше ніж 23%;
– вантажних автомобілів і автопоїздів у спорядженому стані – на уклоні не менше ніж 31%.
Таблиця 5.2 – Ефективність робочої гальмівної системи
при дорожніх випробуваннях (п.31.4.1 ПДР)
| Тип транспортного засобу | Гальмівний шлях в метрах, не більше ніж |
| Легкові автомобілі та їх модифікації для перевезення вантажів | 14,7 |
| Автобуси | 18,3 |
| Вантажні автомобілі з дозволеною максимальної масою до 12т включно | 18,3 |
| Вантажні автомобілі з дозволеною максимальної масою понад 12т | 19,5 |
| Автопоїзди, тягачами яких є легкові автомобілі та їхні модифікації для перевезення вантажу | 16,6 |
| Автопоїзди, тягачами яких є вантажні автомобілі | 19,5 |
| Двоколісні мотоцикли і мопеди | 7,5 |
| Мотоцикли з причепом | 8,2 |
Дорожні випробування, під час яких здійснюється перевірка технічного стану гальмівних систем, проводяться також за ДСТУ 3649-97 “Засоби транспортні дорожні. Експлуатаційні вимоги безпеки до технічного стану та методи контролю”. Окрім того, стандарт передбачає контроль ефективності гальмування робочою і стоянковою гальмівними системами методом стендових випробувань.
5.2.3.3 Державні випробування автомобілів на ефективність гальмування проводять у відповідності до Правил 13 ЄЕК ООН. Згідно з цими Правилами випробування автомобілів ділять на три типи: випробування „нуль”, випробування I і випробування II.
Випробування типу „нуль” проводяться з метою визначення ефективності системи при холодних гальмівних механізмах, коли температура гальмівного диска або барабана не перевищує 100˚С. Ці випробування проводять для усіх АТЗ.
Випробування типу I проводять для визначення ефективності робочої гальмівної системи АТЗ при нагрітих гальмівних механізмах. Цей тип випробувань складається з двох циклів:
– підготовчого, при якому проводиться нагрівання гальмівних механізмів шляхом гальмування на спуску довжиною 1700м і уклоном 7% при швидкості 40 км/год (двигун відключений);
– основного, який виконується не пізніше як через 45с після підготовчого за методикою випробувань типу „ нуль”.
При випробуваннях типу I гальмівний шлях не повинен перевищувати 125% гальмівного шляху, отриманого при випробуваннях типу „нуль”.
Випробування типу II проводяться для визначення ефективності робочої гальмівної системи АТЗ при русі на затяжних спусках. Ці випробування проводять аналогічно випробуванням типу I. Прогрівання гальмівних механізмів виконується на спуску з уклоном 6% і довжиною 6000м при швидкості 30 км/год і включеному двигуні. Основний етап випробувань після прогрівання проводиться за методикою випробувань типу „нуль” не пізніше ніж через 45с, при цьому гальмівний шлях не повинен перевищувати 133% гальмівного шляху, отриманого при випробуваннях типу „нуль”. Випробування проводять для автомобілів і автопоїздів категорії N3.
Ось як проводилися випробування типу „нуль” робочої гальмівної системи автомобіля ЛуАЗ-1302 на полігоні у м. Дімітрово (Росія). Автомобіль розганяли до швидкості на 3...5 км/год більшою за задану початкову швидкість гальмування (80 км/год). Потім двигун від’єднувався від трансмісії шляхом включення нейтрального положення в коробці передач і автомобіль починав рухатися накатом. При досягненні швидкості 80 км/год його загальмовували із зусиллям на педалі гальма 490Н.
Виконувалося не менше 4-х контрольних гальмувань по два в обох напрямках сухої ділянки дороги з коефіцієнтом зчеплення φ≥0,6 при температурі навколишнього середовища від +5 до +30˚С і швидкості вітру ≤5 м/с. Результати державних випробувань автомобіля ЛуАЗ-1302 наведені в таблиці 5.3.
Випробування запасної гальмівної системи проводять при різних варіантах спеціально виключених гальмівних механізмів одного або двох коліс за
Таблиця 5.3 – Результати державних випробувань автомобіля ЛуАЗ-1302
| Параметр | Гальмівний шлях, м | Сповільнення, м/с2 | Відхилення в градусах, не більше | Вихід з коридору шириною 3,5 м |
| За ГОСТ 22895-77 | 50,7 | 5,8 | - | |
| Фактично | 48,5...50,5 | 4,7...5,1 | 2...3 | Немає |
методикою випробувань типу „нуль” з відключеним двигуном. Залишкову ефективність оцінюють за критеріями, встановленими міжнародними і вітчизняними нормативними документами.
Випробування стоянкової гальмівної системи проводять на ділянці дороги, що має поздовжній уклон, заданий технічними умовами на даний автомобіль або іншими офіційними нормативними документами, але не менше як 25%. Автомобіль повної маси встановлюють на ділянці почергово у двох напрямках, тобто вверх і вниз по уклону. Стоянкова гальмівна система має надійно утримувати автомобіль на вказаному уклоні при заданому зусиллі на органі керування не менше 5 хвилин.
Ефективність допоміжної гальмівної системи визначають при спуску автомобіля на ділянці дороги, що має поздовжній уклон 7% і довжину 6км. При цьому система має забезпечувати спуск автомобіля або автопоїзда з постійною швидкістю 30 ± 2 км/год за наявності сповільнювача і 30 ± 5 км/год при гальмуванні двигуном.
За відсутності необхідних уклонів випробування можна проводити шляхом буксирування загальмованого допоміжною гальмівною системою транспортного засобу зі швидкістю 30±1 км/год, вимірюючи при цьому силу тяги (середнє значення) в зчіпному пристрої.
5.2.4 Стійкість
Стійкість – це властивість автомобіля, яка характеризує його здатність зберігати заданий напрям руху підчас дії зовнішніх сил, що намагаються відхилити його від цього напряму. Розрізняють поздовжню і поперечну стійкість.
Поздовжня стійкість – це здатність автомобіля протистояти перекиданню навколо передньої або задньої осі. Оціночним критерієм поздовжньої стійкості транспортного засобу є максимальний (критичний) кут підйому, який він може подолати при рівномірному русі без буксування ведучих коліс:
 ,
,
де α – віддаль від передньої осі до центра мас;
L – база автомобіля;
h – висота центра мас автомобіля;
φx – поздовжній коефіцієнт зчеплення коліс з дорогою (для φx=0,6 α=25...300, для φx=0,3 α=20...150).
Поперечна стійкість – це здатність автомобіля протистояти заносу або перекиданню навколо поздовжньої осі. Заносом називається бокове ковзання автомобіля в результаті дії поперечної сили. Поперечна стійкість визначається при криволінійному русі по дорогах з поперечним уклоном (віражем).
Показниками поперечної стійкості є:
– критична швидкість криволінійного руху транспортного засобу, що відповідає початку заносу
 ,
,
де φy – поперечний коефіцієнт зчеплення коліс з дорогою;
β – кут поперечного уклону дороги (віраж);
R – радіус траєкторії руху,
або при повороті на горизонтальній дільниці дороги
 ;
;
– критична швидкість криволінійного руху транспортного засобу, що відповідає початку його перекидання
 ,
,
де B – колія транспортного засобу;
ηк – коефіцієнт, що враховує вплив деформації ресор і шин на стійкість при перекиданні,
або при повороті на горизонтальній дільниці дороги
 ,
,
– критичний кут поперечного уклону дороги, що відповідає початку поперечного ковзання коліс (умова заносу)
 ;
;
– критичний кут поперечного уклону дороги, що відповідає початку поперечного перекидання транспортного засобу (без врахування деформації ресор і шин)
 .
.
Із наведених залежностей видно, що стійкість автомобіля тим краща, чим
ширша колія В і нижче розташований центр мас h. Величина В/2h, яка входить у формули, називається коефіцієнтом поперечної стійкості. Очевидно, що цей коефіцієнт має бути якомога більшим. Для сучасних конструкцій транспортних засобів він знаходиться в межах: легковиків – 0,9…1,2; вантажівок – 0,55…0,80; автобусів – 0,50…0,60.
Одночасний занос обох мостів автомобіля при русі по дорозі відбувається рідко. Частіше починається ковзання одного з мостів. Це стосується коліс, які навантажені силою тяги або гальмівною силою.
5.2.5 Керованість
Керованість автомобіля – це його властивість зберігати або змінювати напрям руху заданий водієм з мінімальними затратами фізичної і психічної енергії останнього. Критеріями оцінки керованості транспортними засобами є:
– критична швидкість;
– співвідношення кутів повороту керованих коліс;
– автоколивання керованих коліс;
– повороткість;
– стабілізація керованих коліс.
Критичною швидкістю за умовою керованості називають максимальну швидкість криволінійного руху автомобіля без поперечного проковзування керованих коліс:
 ,
,
де θ – кут повороту керованих коліс;
f – коефіцієнт опору коченню коліс.
При досягненні критичної швидкості Vкер руху на повороті керовані колеса проковзують в поперечному напрямку, тому подальше збільшення кута повороту керованих коліс не міняє напрямку руху.
 Необхідне співвідношення кутів повороту керованих коліс досягається конструкцією рульового привода. При криволінійному русі в зв’язку з тим, що внутрішнє і зовнішнє колеса описують криві різного радіуса, внутрішнє по відношенню до центра повороту колесо повинне бути повернуте на більший кут θв > θз (див. рис.5.2).
Необхідне співвідношення кутів повороту керованих коліс досягається конструкцією рульового привода. При криволінійному русі в зв’язку з тим, що внутрішнє і зовнішнє колеса описують криві різного радіуса, внутрішнє по відношенню до центра повороту колесо повинне бути повернуте на більший кут θв > θз (див. рис.5.2).
Автоколивання керованих коліс автомобіля проявляються при русі по нерівному покриттю в певному діапазоні швидкостей у випадку їх нерівномірностей і кінематично неузгоджених конструкцій підвіски та рульового привода. Частота цих коливань 1,0...3,0 Гц, а амплітуда досягає кількох градусів. Це явище утруднює керування автомобілем і призводить до швидкого зношування шин і деталей рульового керування (механізму). Основним способом зниження автоколивань є застосування незалежних підвісок керованих коліс.
Повороткість – це здатність транспортного засобу змінювати напрям руху без повороту керованих коліс. Є дві основні причини повороткості: відведення коліс, викликане поперечною еластичністю шин, і поперечний крен кузова, пов’язаний з еластичністю підвіски.
При криволінійному русі в результаті дії поперечної сили кочення колеса автомобіля в силу своїх еластичних властивостей супроводжуються відведенням, тобто кочення колеса відбувається під деяким кутом до площини його обертання. Кут утворений вектором швидкості центра колеса з площиною його обертання називається кутом відведення δ (див. рис. 5.3).
Залежно від співвідношення кутів відведення коліс передньої і задньої осі розрізняють повороткість:
– нейтральну (δ1= δ2; Rδ=R);
– недостатню (δ1> δ2; Rδ>R);
– надлишкову (δ1< δ2; Rδ<R),
де Rδ – радіус повороту автомобіля з еластичними шинами;
R – радіус повороту автомобіля з жорсткими шинами.
 Автомобіль з недостатньою повороткістю більш стійкий і краще зберігає заданий напрям руху, ніж автомобіль з надлишковою повороткістю. Складність керування транспортним засобом з надлишковою повороткістю зростає із збільшенням швидкості руху, і при певній швидкості він може втратити керованість. Тобто при незначному бічному поштовху і нейтральному положенні керованих коліс виникає швидко наростаюче відведення, яке призводить до заносу автомобіля. Щоб забезпечити недостатню повороткість автомобіля, зменшують тиск повітря в шинах передніх коліс порівняно з тиском в задніх, зміщують дещо центр мас в напрямку передньої осі. Крен кузова може підсилювати або послаблювати поворотність автомобіля, тому необхідну повороткість можна отримати також за рахунок різної конструкції підвіски.
Автомобіль з недостатньою повороткістю більш стійкий і краще зберігає заданий напрям руху, ніж автомобіль з надлишковою повороткістю. Складність керування транспортним засобом з надлишковою повороткістю зростає із збільшенням швидкості руху, і при певній швидкості він може втратити керованість. Тобто при незначному бічному поштовху і нейтральному положенні керованих коліс виникає швидко наростаюче відведення, яке призводить до заносу автомобіля. Щоб забезпечити недостатню повороткість автомобіля, зменшують тиск повітря в шинах передніх коліс порівняно з тиском в задніх, зміщують дещо центр мас в напрямку передньої осі. Крен кузова може підсилювати або послаблювати поворотність автомобіля, тому необхідну повороткість можна отримати також за рахунок різної конструкції підвіски.
Стабілізація – це властивість керованих коліс зберігати і відновлювати нейтральне положення, що відповідає прямолінійному рухові після припинення дії зовнішніх сил. Ця властивість проявляється в результаті дії стабілізуючих моментів. У свою чергу, стабілізуючі моменти утворюються в результаті наявності бокової еластичності шини, а також спеціального нахилу шворнів поворотних цапф у поздовжній і поперечній площинах.
5.2.6 Габаритні і масові параметри транспортних засобів
Параметри транспортних засобів визначаються їх габаритними розмірами і масою. Максимальні габаритні розміри, відповідно до п.22.5 ПДР, наведені в таблиці 5.4. У цьому ж пункті правил зазначається, що встановлені маршрути – це окремі спеціальні маршрути, які встановлює Укравтодор і Державтоінспекція.
Таблиця 5.4 – Максимальні габаритні розміри транспортних
засобів (в знаменнику для контейнеровозів)
| Вид маршруту | Габаритні розміри, м | ||
| довжина | ширина | висота | |
| Звичайний | 22,0 | 2,6 | 4,0 |
| Встановлений | 25,0 | 2,6 | 4,0 /4,35 |
Довжина і взаєморозміщення окремих зовнішніх точок транспортного засобу визначають його профільну прохідність (є ще опорна прохідність, яка визначає можливість руху у поганих дорожніх умовах і по деформованих ґрунтах). Профільна прохідність характеризує здатність транспортного засобу долати нерівності дороги, перешкоди і вписуватись в дорожні габарити. Вона визначається такими геометричними параметрами (див. рис.5.4):
– hпр – дорожній просвіт;
– lп і lз – передній і задній звис;
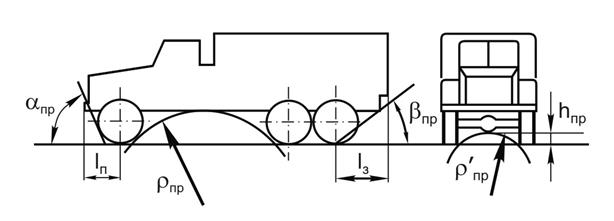
Рисунок 5.4 – Геометричні показники прохідності автомобіля
– αзв і βзв – кути звису;
– ρпр – радіус поздовжньої прохідності;
– ρ'пр – радіус поперечної прохідності.
Крім того, для автопоїздів оціночними параметрами являються кути гнучкості у вертикальний α і горизонтальний β площинах, тобто максимальні кути можливого відхилення осей зчіпного і тягового пристроїв (див. рис.5.5).
 Маневреність транспортного засобу характеризує його здатність змінювати напрям руху в горизонтальній площині на мінімальній площі. Показниками маневреності є ширина коридору руху на повороті і мінімальний радіус повороту зовнішнього керованого колеса. Збільшення довжини призводить до зниження маневреності і до погіршення характеристик транспортного потоку.
Маневреність транспортного засобу характеризує його здатність змінювати напрям руху в горизонтальній площині на мінімальній площі. Показниками маневреності є ширина коридору руху на повороті і мінімальний радіус повороту зовнішнього керованого колеса. Збільшення довжини призводить до зниження маневреності і до погіршення характеристик транспортного потоку.
 Ширина транспортного засобу визначає коридор руху, тобто ширину проїжджої частини, необхідної автомобілю при русі за умов безпеки. Крім того, як видно з рисунка 5.6, чим вища швидкість V, тим необхідний більший коридор руху Вк. Висота транспортного засобу визначає його прохідність під штучними спорудами по дорозі, стійкість, а також аеродинамічні характеристики. Залежно від висоти, розміщення і виду вантажу міняється центр мас автомобіля, а значить і показники його стійкості.
Ширина транспортного засобу визначає коридор руху, тобто ширину проїжджої частини, необхідної автомобілю при русі за умов безпеки. Крім того, як видно з рисунка 5.6, чим вища швидкість V, тим необхідний більший коридор руху Вк. Висота транспортного засобу визначає його прохідність під штучними спорудами по дорозі, стійкість, а також аеродинамічні характеристики. Залежно від висоти, розміщення і виду вантажу міняється центр мас автомобіля, а значить і показники його стійкості.
Що стосується масових параметрів транспортних засобів, то стійкість автомобіля збільшується при (див. рис.5.7):
– рівності навантаження на передні і задні колеса;
– збільшенні загальної маси (крива 1);
– збільшенні відношення загальної маси до маси вантажу (крива 2);
 – збільшення відношення ширини колії автомобіля до висоти центра мас (крива 3).
– збільшення відношення ширини колії автомобіля до висоти центра мас (крива 3).
З метою забезпечення безпеки руху, а також у зв’язку з необхідністю збереження дорожніх покриттів у Правилах дорожнього руху (п. 22.5) викладені обмеження на вагу автотранспортних засобів та осьові навантаження для звичайних і встановлених маршрутів, наведені в таблиці 3.5.
Таблиця 5.5 – Обмеження транспортних засобів за навантаженням
(в знаменнику для контейнеровозів)
| Вид маршруту | Маса, т | |||
| одиночна вісь | здвоєна вісь | строєна вісь | фактична маса | |
| Звичайний | 16/18 | 22/24 | 38/44 | |
| Встановлений | 16/18 | 22/24 | 40/46 | |
5.2.7 Інформативність автомобіля
Інформативність – це властивість транспортного засобу забезпечувати учасників руху необхідною інформацією в процесі руху. Від керованого транспортного засобу до водія поступає внутрішня інформація і одночасно від транспортних засобів, що знаходяться в геометричному полі його зору, – зовнішня.
Внутрішня інформативність може бути візуальною, звуковою і тактильною. До візуальної відносяться світлові сигналізатори, стрілочні сигналізатори, символічні зображення; до звукової – звукові сигналізатори, шум агрегатів автомобіля, радіоприймач; до тактильної – рульове колесо, важіль коробки передач, педалі, сидіння водія, клавіші і перемикачі.
Сьогодні все частіше знаходять застосування прилади внутрішньої звукової сигналізації. Їх встановлюють для контролю падіння рівня рідини, тиску повітря в гальмівній системі, тиску повітря в шинах і т. д. Переваги звукових сигналів не тільки в більш високому сприйнятті їх людиною, а й в можливості прийому без відволікання від зорової інформації. Поєднання ж звукових сигналів із зоровими дає значно більший ефект, ніж кожний з них окремо.
Зовнішня інформативність може бути тільки візуальною і звуковою. До візуальної відносяться кузов, світлові сигнали (їх форма, розміри, колір, розміщення), до звукової – звуковий сигнал, інші шуми і їх інтенсивність.
Однією з вимог, що ставиться до транспортних засобів, є забезпечення необхідного контрасту між його кольором і кольором навколишнього середовища. Так, наприклад, зелений автомобіль весною і влітку, сірий і коричневий в осінній період, а білий – зимою можуть зливатися з навколишнім середовищем. Автомобілі, пофарбовані в яскраві кольори (оранжевий, червоний, жовтий, білий), за даними статистики рідше попадають в ДТП.
5.2.8 Освітлення і сигналізація автомобіля
5.3.8.1 Автономна система освітлення транспортного засобу служить для забезпечення видимості в умовах недостатнього рівня зовнішнього освітлення.
На сьогоднішній день всі автомобілі оснащуються так званими головними фарами, які мають у своєму складі два типи освітлення – ближнє і дальнє. Крім того, на автомобілі можуть встановлюватися додатково ширококутні протитуманні фари, фари-прожектори далекої дії і фари заднього ходу.
Кількість, розміщення, колір, кути видимості і світлотехнічні характеристики нормуються відповідними вітчизняними документами (ДСТУ) і міжнародними (Правилами ЄЕК ООН, рекомендаціями ISO і т. д.).
Фари ближнього світла призначені для освітлення дороги попереду автомобіля за наявності зустрічних транспортних засобів; фари дальнього світла – за відсутності зустрічних транспортних засобів.
Ширококутні протитуманні фари призначені для покращення умов видимості при русі по горизонтальних кривих невеликих радіусів, проїзді пересічень, а також при пониженій прозорості атмосфери (туман, дощ, сніг і т.д.). Фари-прожектори використовуються при рухові з високими швидкостями на позаміських прямолінійних дільницях доріг з невисокою інтенсивністю руху.
Основним показником ефективності системи освітлення автомобіля є безпечна швидкість, яка знаходиться з умови рівності необхідної дальності видимості і зупинного шляху:
 ,
,
де Uб – безпечна швидкість руху з умови видимості;
Sв – дальність видимості перешкоди;
j – усталене освітлення;
Т – сумарний час реакції водія, спрацювання привода, додаткового часу реакції водія, необхідного для сприйняття перешкоди в нічний час, і часу зростання сповільнення при екстреному гальмуванні.
3.3.8.2 Система зовнішньої світлової сигналізації призначена для передачі інформації про положення транспортного засобу в просторі (на дорозі) стосовно до інших учасників руху, про маневри і стан транспортного засобу. Інформація, яка передається зовнішніми світловими сигналами, сприяє правильному прогнозуванню учасникам руху послідуючої дорожньо – транспортної ситуації.
До світлової сигналізації ставляться вимоги забезпечення надійного сприймання в дорожньо-транспортних ситуаціях інформації, що передається, та виключення осліплення і дискомфортності зорового сприймання. Правилами ЄЕК ООН визначений мінімальний обов’язковий комплект зовнішніх світлосигнальних приладів, а саме:
– сигнал гальмування;
– габаритні вогні (передні і задні);
– покажчики поворотів (передні і задні);
– освітлення номерного знака;
– освітлення знака автопоїзда.
Їх розміщення, колір, кути видимості і фотометричні характеристики також регламентуються вітчизняними та міжнародними документами.
Крім перерахованих, існують додаткові сигнали, рекомендовані міжнародними стандартами, а саме: сигнали збільшення габариту автомобіля при відкриванні дверей; світловий покажчик сповільнення руху; контурні вогні; бокові вогні; попереджувальні трикутники і інші.
Сьогодні всі транспортні засоби оснащені світловими сигналами, що мають постійні фотометричні і кольорометричні характеристики або працюють в режимі “день-ніч“. Натомість, враховуючи надзвичайно широкий діапазон зміни рівня освітленості потягом доби, необхідний з позиції безпеки руху сигнал, який автоматично міняв би фотометричні характеристики залежно від рівня зовнішньої освітленості. Такий сигнал називається адаптивний.
5.2.9 Робоче місце водія
Робоче місце водія характеризується такими показниками, як мікроклімат, ергономічні властивості, шум і вібрація, загазованість, плавність ходу.
До мікроклімату відносяться температура, вологість, швидкість руху повітря і їх поєднання. Оптимальним температурним режимом вважається 17...24˚С (див. рис. 5.8). Зниження або підвищення температури призводить до сповільнення реакції, зниження розумової діяльності, фізичної втоми і, як результат, зниження продуктивності і рівня безпеки.
Вологість і швидкість повітря значною мірою впливають на терморегуляцію організму. При низькій температурі і високій вологості підвищується тепловіддача і організм піддається більш інтенсивному охолодженню. При високій температурі і високій вологості тепловіддача різко знижується, що веде до перегріву організму. Рекомендується швидкість повітря в салоні приблизно 1м/с і вологість 40...60%.
 Ергономічні властивості характеризують відповідність розмірів та форми сидіння, органів керування транспортного засобу антропометричним параметрам людини. Конструкція сидіння повинна сприяти посадці водія за органами керування, котра, в свою чергу, забезпечує мінімум фізичних затрат тривалий час. Взаєморозміщення і конструкція органів керування мають забезпечувати необхідні дії водія з заданою точністю в межах допустимого часу, а також формувати відчуття на шкірній поверхні.
Ергономічні властивості характеризують відповідність розмірів та форми сидіння, органів керування транспортного засобу антропометричним параметрам людини. Конструкція сидіння повинна сприяти посадці водія за органами керування, котра, в свою чергу, забезпечує мінімум фізичних затрат тривалий час. Взаєморозміщення і конструкція органів керування мають забезпечувати необхідні дії водія з заданою точністю в межах допустимого часу, а також формувати відчуття на шкірній поверхні.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|