- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
Механические потери и потери трения щёток
Механические потери и потери трения щёток
Механические потери имеют место быть в подшипнике, потери трения щёток возникают в асинхронном двигателе с обмотанным ротором. Эти потери составляют ноль на старте. По мере того, как возрастает скорость, данные потери увеличиваются. В трёхфазных двигателях скорость обычно остаётся постоянной. Отсюда следует, что и данные потери почти остаются постоянными.
Переменные потери
Эти потери также называются потерями меди. Данные потери происходят из-за электрического тока, идущего по обмоткам статора и ротора. Когда нагрузка меняется, данный электрический ток также изменяется, а потому и потери эти тоже претерпевают изменения. Поэтому их и назвали переменными потерями. Их можно получить при помощи проведения теста с заблокированным ротором трёхфазного двигателя.
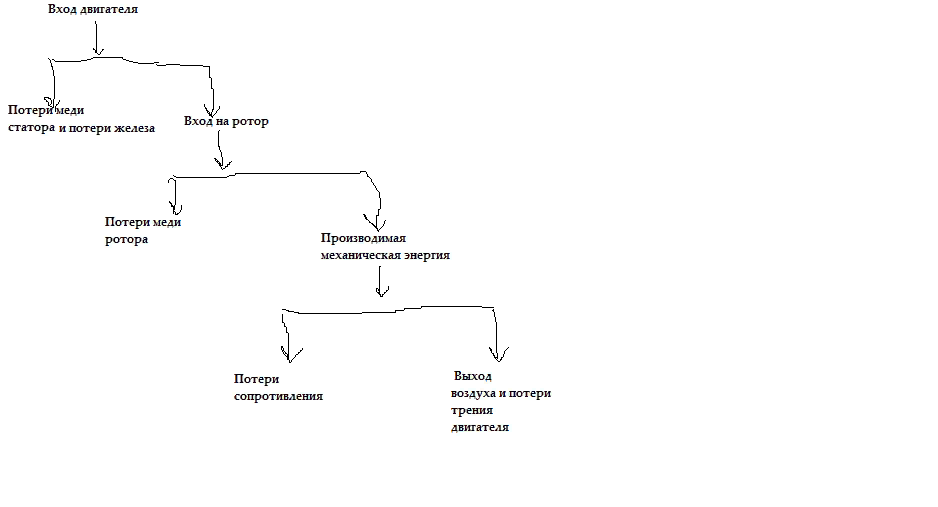
Основная функция асинхронного двигателя состоит в том, чтобы преобразовывать электрическую энергию в механическую энергию. В течение данного преобразования одной энергии в другую, энергия проходит через различные этапы. Данная энергия, проходящая через разные ступени, отображается на диаграмме течения энергии.
Как известно, на входе трёхфазного асинхронного двигателя трёхфазная подача. Так что эта трёхфазная подача идёт на статор трёхфазного электродвигателя.
Допустим, Pin = электрическая энергия, которая идёт на статор трёхфазного двигателя,
VL = линейное напряжение, поступающее статору трёхфазного двигателя,
IL = линейный ток,
Cos = коэффициент мощности трёхфазного двигателя.
Вход электрической энергии на статор, Pin = 3VLILcos.
Часть этой энергии на входе используется для поддержки потери статора, которыми являются потери железа статора и потери меди статора. Сохраняющаяся энергия (электроэнергия на входе – потери статора) идёт на ротор как вход на ротор.
Так что вход на ротор, P2 = Pin – потери статора (потери меди статора и потери железа статора). Теперь ротор должен преобразовать этот вход на ротор в механическую энергию, но этот завершённый вход не может быть преобразован в механический выход, поскольку он должен поддерживать потери ротора.
Бывает два типа потерь ротора, а именно потери меди и потери железа. Потери железа зависят от частоты ротора, которая очень мала, когда ротор вращается. Поэтому этим обычно пренебрегают. Так что можно сказать, что ротор имеет лишь потери меди. По этой причине вход на ротор должен поддерживать эти потери меди. После этой поддержки, оставшаяся часть входа ротора, P2 преобразовывается в механическую энергию, Pm.
Допустим, Pc будет потерями меди ротора,
I2 будет током ротора в рабочем состоянии,
R2 – сопротивлением ротора,
Pm – общая производимая механическая энергия.
Pc = 3I22R2
Pm = P2 – Pc
Теперь эта создаваемая механическая энергия идёт на нагрузку за счёт вала, но появляются некоторые механические потери, такие как потери трения и потери сопротивления воздуха. Так что общая воспроизводимая механическая энергия должна быть подана на поддержание этих потерь.
Поэтому выход образуемой энергии идёт на вал, который в конечном итоге подаёт её нагрузке, Pout.
Pout = Pm – механические потери (потери трения, а также потери, связанные с сопротивлением воздуха).
Pout зовется энергией вала. Также его называют полезной энергией.
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|