- Автоматизация
- Антропология
- Археология
- Архитектура
- Биология
- Ботаника
- Бухгалтерия
- Военная наука
- Генетика
- География
- Геология
- Демография
- Деревообработка
- Журналистика
- Зоология
- Изобретательство
- Информатика
- Искусство
- История
- Кинематография
- Компьютеризация
- Косметика
- Кулинария
- Культура
- Лексикология
- Лингвистика
- Литература
- Логика
- Маркетинг
- Математика
- Материаловедение
- Медицина
- Менеджмент
- Металлургия
- Метрология
- Механика
- Музыка
- Науковедение
- Образование
- Охрана Труда
- Педагогика
- Полиграфия
- Политология
- Право
- Предпринимательство
- Приборостроение
- Программирование
- Производство
- Промышленность
- Психология
- Радиосвязь
- Религия
- Риторика
- Социология
- Спорт
- Стандартизация
- Статистика
- Строительство
- Технологии
- Торговля
- Транспорт
- Фармакология
- Физика
- Физиология
- Философия
- Финансы
- Химия
- Хозяйство
- Черчение
- Экология
- Экономика
- Электроника
- Электротехника
- Энергетика
РОБОТ-ОРИГАМИ
РОБОТ-ОРИГАМИ
Долгое время самодостаточные машины были одной из ключевых идей в научной фантастике. Стругацкие описывали кибернетическое яйцо, способное автономно развиваться в нужные устройства, а меняющие облик трансформеры полюбились детям и тем, кто остался ребёнком в душе. На протяжении многих лет исследователи из Массачусетского технологического института и Гарвардского университета работали над тем, чтобы претворить эти фантазии в жизнь хотя бы частично. В последнем номере журнала Science они опубликовали схему робота, который самостоятельно складывается по типу оригами из плоских заготовок, обретает форму и начинает двигаться.
В конструкции робота использованы прежние наработки его соавторов в области запрограммированной трансформации композитных материалов под действием тепла. Ранее они уже демонстрировали на Международной конференции по робототехнике и автоматизации самосборку куба и объёмной фигурки гуманоидного робота. Принцип здесь остался тот же: регулируя температуру можно заставить пластик сгибаться на определённый угол по заранее нанесённым лазером бороздкам.
Самосборка робота-оригами (фото: wyss.harvard.edu).
По словам разработчиков, в идеале требуется создать технологию, которая обеспечит сгибание пластика на точно заданный угол в пределах от одного до ста восьмидесяти градусов. В текущем варианте удалось достичь изгибания максимум на сто пятьдесят градусов, чего уже достаточно для большинства практических применений.
Все фрагменты робота-оригами сделаны пятислойными. Основной слой находится в середине «сэндвича» и представляет собой медный лист, в котором лазером вырезали соединения электрической схемы. В нём же размещаются выводы радиоэлементов и контакты для источника питания.
Исходные размеры листа для корпуса робота-оригами чуть меньше формата A4 и составляют 21,5 см на 28 см. С двух сторон медный слой изолирован диэлектрическими вставками из плотной бумаги. Наружные слои изготовлены из композита на основе полистирола. На них нанесены линии сгиба разной глубины, которые и обеспечивают запрограммированную деформацию при нагревании.
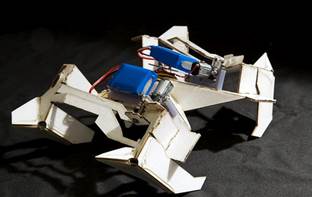
Робот-оригами после самосборки (фото: Harvard’s Wyss Institute).
«Самое удивительно здесь – это способность робота точно сложиться в объёмную фигуру из плоских листов, согласно предварительно выполненным расчётам», – говорит профессор электротехники и компьютерных наук MIT Даниэла Рус (Daniela Rus).
Во время демонстрации часть манипуляций с прототипом выполнялась вручную. Процесс самосборки был инициирован подключением аккумулятора и проходил поэтапно под действием встроенного нагревательного элемента. Затем в готовый корпус был установил микроконтроллер и запущена управляющая программа, которая заставила робота ползти по столу.
Соавтор исследования профессор Эрик Демейн (Erik Demaine) поясняет, что ручное вмешательство было сделано ради ускорения презентации. В условиях серийного производства роботов процесс их самосборки может быть автоматизирован более полно и запускаться одним движением.
Созданный робот передвигается на четырёх ногах со скоростью 5 см/с. Каждая его нога имеет только одну степень свободы, но этого достаточно для демонстрационных целей. «Раньше мы показали возможность простой самосборки, – поясняет Демейн. – Теперь же мы смогли усложнить объёмные фигуры и заставить их двигаться».
|
|
|
© helpiks.su При использовании или копировании материалов прямая ссылка на сайт обязательна.
|